| GR |
|
|
|
|
|
Um meine Erlebnisse mit Telecont-Steuerungen
und deren Reparaturen nie-
derzuschreiben und die Übersicht über die
Verwechslungen an Empfängern
und den
anfallenden Reparaturen aufzuzeigen,
wurde diese Seite eingerichtet.
Es kam dabei viel
zusammen. Wie letztendlich meine
drei Telecont-Repara-
turen im
Einzelnen abgelaufen sind und wie eine
Telecont Steuerung funktio-
niert, wird nachstehend beschrieben.
Alles ein Erfahrungsbericht.
Nachdem inzwischen die beiden reparierten 27mHz
Steuerungen eingetroffen
waren konnten sie erprobt
werden. Erstmals sah ich, wie eine Telecont Steue-
rung
arbeitet. Unglaublich, alles funktioniert wieder.
Ohne den Experten Horst
wären die Sachen nur Muster ohne Wert geblieben.
Jetzt
kann ich den Unterschied zur Variophon Steuerung sehen
und erproben.
Die nachfolgenden Berichte gliedern sich in:
.) Die
Telecont 40mHz-3Kanal -Sender S1 mit falschem Empfänger
E1,
Funktions-
und Reparaturbeschreibung
.) Der
Telecont 27mHz-9Kanal-Sender S2 mit falschem Empfänger
E1 und
dessen Reparatur. Später
ergänzt mit Ausbaustufe E3 auf 5 Kanäle
.) Ein Telecont
27mHz-9Kanal-Komplett-Set S2, E2 - schwierige Reparatur
.)
diverse Rudermaschinen, Anwendung und neuere Technik,
Reparatur EKV
.)
Laienhafte (fragwürdige) Vergleichsmessungen der Senderleistung
|

Telecont S1 - 3K-, 40.68mHz
Funktionsvideo

Telecont S2 - 9K, 27,120mHz
Funktionsvideo |
|
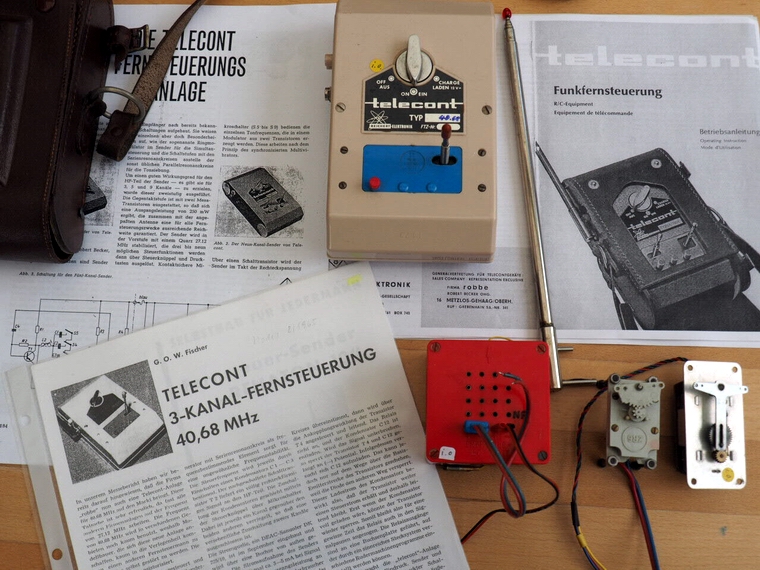
Funktion und
Reparatur eines Telecont S 1 - 3-Kanal Sets mit 40,68 mHz (Set
Nr 1) |
Allgemeine
Vorinformationen rund um die Telecont Steuerungen
2023
hat alles begonnen und war es so weit, dass ich eine schön aussehende komplette
40mHz-
Telecont S1 3K-Steuerung bei Ebay erstehen konnte. Bei dem
Verkäufer hatte ich schon mehrere
Dinge zufriedenstellend
gekauft, was mir den Kaufentschluss
erleichterte. Also schlug ich bei seinem
Angebot
einer 40mHz Telecont 3Kanal Steuerung, bestehend aus
Sender, Empfänger und zwei Ruder-
maschinen, Betriebsanleitung und Schaltplänen, erfreut
zu.
Der Telecont 3K-Sender hat
einen Steuerknüppel für Rechts-
Linkssteuerung und einen Taster für.......
Die Bezeichnung des
3K-Senders ist S1, der Empfänger ist die
generelle 3K-Grundstufe E1.
Die Sender Ausgangsleistung beträgt ca. 250mW, was eine
lt. Hersteller eine Steuerdistanz bis 2km
ermöglichen soll.
Das Set arbeitet
auf der Frequenz 40,68 mHz.
Zu meinem 3
K-Sender gibt es die passende 3K-Empfänger Grundstufe,
eine Einkanal und eine
Zweikanal-Rudermaschine und
gaaaanz wichtig, die gut erklärende Betriebsanleitung.
Mangesl
Reichweite (nur 30cm) wurde das Set vom Verkäufer zu einem
Elektroniker zur Überarbei-
tung weitervermittelt
und repariert. Damitz begann meine Telecont Story mit
meinen Sendern usw.
Mit dieser Anlage hoffte ich zu lernen, wie schnell
getippt werden muss, um bestimmte Ruderaus-
schläge zu erreichen und wie man
mit den nur 3 Kanälen, ehemals mehrere steuerbare
Funktionen
realisieren konnte. Eine
Programmierung des Senders wie heute, gibt es
natürlich nicht, auch keine
Trimmungen. Für die diversen Funktionen mussten im Modell
und bei den Rudermaschinen Ideen
gefunden werden, um sie
nutzbar einsetzen zu können.
Mir
schwebte damals vor, mit einer Telecont Steuerung mein altes
vollholz-Schiffsmodell, mein
Fahrgastschiff
Liberty, zu steuern. Mangels
Geschwindigkeitsregelung im 3K-Betrieb solle zumin-
dest
neben dem Rudetr eine
Umschaltung der Fahrt voraus - Stop - retour, möglich
sein.
Technische
Details zur Funktion der Telecont Tipp-Steuerungen
Zur besseren Vorstellung
- Größenangaben von
Empfänger und Ausbaustufen:
Empfänger
Grundstufe E1-3K: 65x64x45mm (170g),
Ausbaustufe
E2-6K: 65x65x45 (190g),
9K Empfänger E1+E2:
65x65x90mm (365g),
Ausbaustufe E3-2K:
65x656x30mm (110g),
5K Empfänger E1+E3:
65x65x75mm (280g)
Inzwischen
habe ich mich ein wenig tiefer in die Bedienungsanleitung,
alteTestberichte und elektroni-
sche
Funktionsbeschreibungen
eingelesen und einiges gelernt. Die
Funktion des Pendelaudion-Emp-
fängers basiert
auf der Schaltung
von Relais durch Tonfrequenzen. Sie werden nach einem
Steuer-
impuls vom Sender im Empfänger erkannt und
es schalten die zuständigen Relais, die in der Folge
die Rudermaschinen
(= Servos) bewegen.
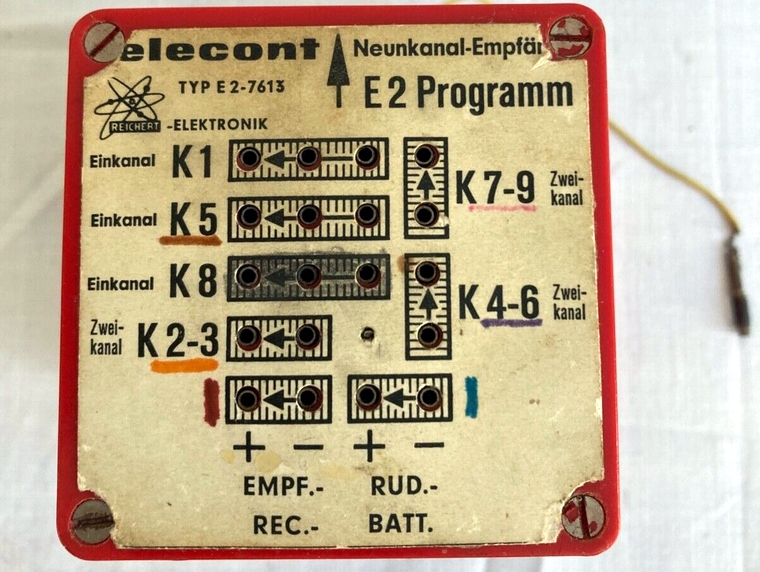
Die einzelnen Empfänger
Ausbaustufen, wenn vorhanden, werden mit je zwanzig
Steckerstiften auf
die 3K-EmpfängerGrundstufe
aufgesteckt (zähe Sache, aber das hält). Mit einer 2K-Ausbaustufe
bekommt man einen 5K Empfänger, die 6K-Ausbaustufe
ergibt den 9K Empfänger. Für den 5K- bzw.
9K Empfänger
gibt es genau dazupassende Sender. Auf jedem Empfänger
sind
kanalabhängige
"Programmkarten" aufgelegt,
welche die Steckpositionen
der verwendbaren Rudermaschinen-Typen
und der
Stromanschlüsse für Empfänger und Rudermaschinen anzeigen.
Am
Anfang immer
beachten: Die heikle Entnahme des Senders aus dem
steifen Lederetui:
Für
Wartungsarbeiten wie zB. den Akkutausch,
ist erforderlich, den Sender aus dem Lederetui
heraus zu nehmen. Dazu ist das seitliche Leder-Distanzstück
rechts neben dem Sender aus dem Etui
herauszuziehen. Dadurch kann der
Sender zur Seite gedrückt werden,
damit der Lade- und Antennen-
stecker auf der anderen
Seite ins Etui hineingleiten zu können. Danach
kann man den Sender schon
ein Stück herausziehen.
Doch dann kommt der Moment, an dem die in Federspiralen
befindlichen
Steuerknüppel aus deren
Halterrohren herausgezogen und umgelegt werden
müssen, um unter dem
schmalen Ledersteg durchgleiten zu können. Mit
angehobenem Ledersteg kann der Sender mit den
nach vorne umgelegten
Knüppeln und den Tasten, vorsichtig aus dem Etui herausgezogen werden.
Sinngemäß
ist bei der Einschiebung des Sendergehäuses vorzugehen.
Möchte man den Telecont Sender im Lederetui in Betrieb nehmen,
muss man nach dem Öffnen der
Etuihaube den/die
Knüppel in den Federn nach unten ins Führungsrohr
einschieben. Der/die Knüppel
sind dann
fix mit dem Tastschaltern verbunden und etwa 5cm lang.
Um das Etui nach dem Betrieb
wieder zu schließen,
müssen unbedingt die Knüppel
wieder aus den
Halterohren in die Federspirale heraugsezogen und
danach umgelegt
werden.
Auswahl der Rudermaschinen für Telecont Steuerungen
Servos
= Rudermaschinen
müssen für derartige Steuerungen grundsätzlich nach
ihrem Verwendungs-
zweck ausgewählt werden. Es gibt viele Varianten,
auch von Robbe und anderen Herstellern. Die
an-
fangs mitgekauften Servos von EKV, oder andere
von Robbe, werden mit 6V Betriebsspannung
betrieben.
Die für die Graupner Variophon Steuerung gebräuchliche Kinematic wird mit 4,5V
betrieben, was eine
gesonderte "quasi externe"
Stromversorgung wie bei
Graupner dafür vorgeschlegen notwenig macht.
Für
die Graupner Duomatic mit 6V und andere 6V
Rudermaschinen besteht das Problem nicht.
Möchte man am Telecont Empfänger Graupner Servos,
zB. Bellamatic, Servoautomatic oder Unimatic,
etc. anschließen, bedarf es nur 2,4V Versorgungsspannung
und Zwischenkabeln wegen der unter-
schiedlichen
Servostecker.
Eine Mischung von 6V- und 2,4V- Rudermaschinen
über den Empfängeranschluss ist nicht möglich
(ausgenommen externe Sonderversorgung sinngemäß wie bei
der Graupner Kinematic).
Betreffend die Verwendung von
Ein- oder Zweikanal Servos ist nach einer, am Empfänger
auflegbaren
Programmkarte, vorzugehen. Es
können mit dem 3K-Empfänger zB. drei Einkanal-Servos, oder ein
Einkanal- und ein Zweikanal Servo,
angesteuert
werden. Der gleichzeitige (simultane) Betätigung des
Knüppels und des Tasters ist mit
dem 3K-Sender nicht möglich, wohl aber bei einem 9K Sender.
Akkus für die Stromversorgung
Für den
Sender musste wieder ein klein bauender Nachfolge-Akkutyp gleicher
Baugröpße, ehemals
10 Zellen DEAC NiCd Akkus,
heute erhältliche bei VARTA ein mit NiMh-Zellen in Form eines zehnzel-
ligen 12V
Akkus mit 250mAh Kapazität beschafft werden. Dieser Akku passt genau ins Senderge-
häuse.
- Geladen wird mimdestens 14 Stunden
lang mit max. 25mA.
Für die Stromversorgung des Empfängers und der
Servos werden an frühere Gegebenheiten ange-
passt, fünfzellige VARTA NiMh 6V Akku mit 350mAh verwendet, die mit max. 35mA in 14 Std.
geladen
werden dürfen.
Es gäbe von
Telecont Ladegeräte für die langen Ladezeiten (mit 1/10
C) , doch sind sie heutzutage
kaum
mehr zu bekommen. Heute muss man dazusehen,
dass man noch ein Ladegerät mit diesen
niedrigen
Ladeströmen für die heiklen NiMh-Kleinakkus für den Sender und Empfänger bekommt.
Heute
besteht die Möglichkeit, 3 in Serie geschaltete
Lipo Akkuzellen
im AA-Format von mit
velfach
höherer Kapazitzät zu verwenden. Das würde die ladetechnisch heiklen
NiMh-Akkus ersetzen.
In meinen
Graupner Variophon Sendern bin
ich inzwischen auf 3 S 2200 Lipos umgestiegen.
Daher
habe ich mich entschlossen, den einen 9K-Sender mit dem
ich bisher die Liberty gefahren bin,
mit einem
3S1050mAh Lipo auszustatten. Aus 3 Zellen wurde er
zusammengestellt und passt seht gut
in das
Gehäuse. Zum Laden des Akkus wurde eine Steckbuchse
eingebaut, welche für den 3S Balan-
ceranschluss
mit Kabeln zum Akku verdrahtet wurde. Im Deckel des
Senders konnte der 5 polige
Simprop-Stecker
eingeklebt werden über den jetzt geladen werden kann.
Der 3S Lipo ist mit einem
Steckeranschluss mit
der Elektronik verbunden, sodass der Akku gegen den 12V
NiMh Akku gewech-
selt werden könnte, ohne
löten zu müssen. Der Ladestrom für den Lipo darf nicht
über 1A betragen.
Achtung:
Wichtig ist, dass mit dem
serienmäßigen 12V Klinkensteckerkabel nicht mehr geladen
werden darf!
Für die Empfänger-
und
Rudermaschninen- Stromversorgung kann man heute
natürlich einen 5zelligen
NimH-Akku mit zB.
Eneloop 2000mAh verwenden. Man kann auch beim 2000er 6V
Akku eine Anzap-
fung für 6V bei allen 5 Zellen
und eine gesonderte Anzapfung bei nur 2 Zellen für 2,4V anfertigen.
Das
ist auch im Modell vorteilhaft und geaden wird dann nur ein Akku und
der in kürzerer Zeit.
Jetzt
wird es spannend - Die erste Erprobung der 40mHz - Steuerung
Für den Test meiner ersten
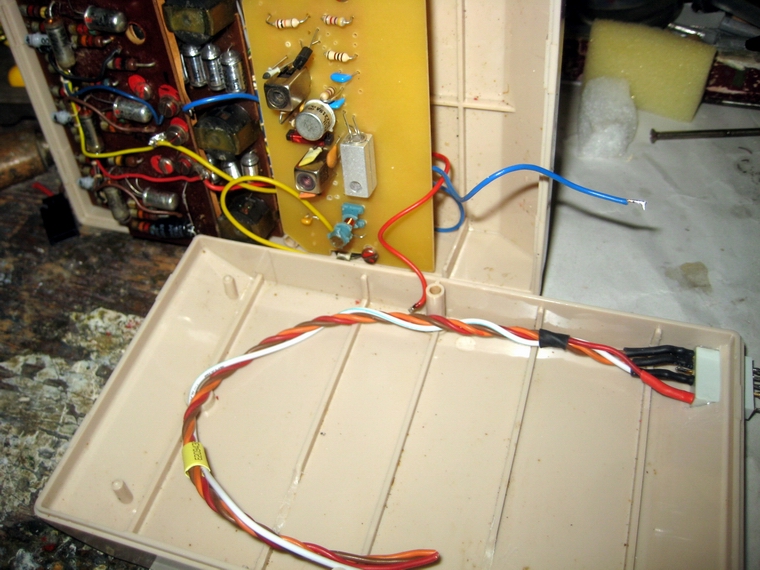
Telecont-Anlage wurde ein neuer 12V Akku im Sender eingebaut. An
den Anschlusskabeln konnte man durch die Oxydation
sehen, dass das Kupfer der Litzen schwarz
war, da der Akku bei
seinem Ableben vielleicht Schadstoffe vordringen hat lassen? Die
Akku An-
schlusskabel im Sender mussten daher erneuert
werden.
Für die beiden
VARTA-6V Akkus für
die Empfänger-
und Servo Stromversorgung, wurde ein ge-
meinsames Schalterkabel angefertigt, mit dem die Akkus am
Emfänger angeschlossen werden
konnten. Die
dazu erforderlichen Stecker für die Rudermaschinen und
die für den Betrieb notwen-
digen Blindstecker am 3K
Empfänger, wurden aus Kieferleisten mit 1,5mm Messingdrahtstiften
angefertigt.
Der erste Test
Nach dem
Einschalten des Senders wurde auch der Empfänger
eingeschaltet und ein Steuerver-
such unternommen,
doch an
den angeschlossenen Rudermaschinen gab es keine
Bewegung! Es
fehlten zwei
Blindstecker die
zusätzlich eingesteckt werden müssen, wie es in der
BA geschrieben
steht. Daher wurden
provisorische Drahtbrücken
angefertigt und ein neuerlicher Test durchgeführt.
Bei Schalterstellung EIN am Sender war vorerst keine
Reaktion erkennbar. Erst nach einem Deut
weitergeschaltet, kam zaghaft
Bewegung in die Rudermaschinenen.- Kontaktoxydation am
Schalter!
Vorerst gab es noch keine
echte Reaktion an den Rudermaschinen, im Empfänger
hörte man je-
doch Relais klicken, was Hoffnung
aufkommen ließ.
Durch mehrfaches Herumschalten
mit dem Hauptschalter des Senders und in einer Position mit der
Antenne nahe dem
Empfänger, kam plötzlich Bewegung bei der
Zweikanalrudermaschine ZR 6 in
beiden
Richtungen zustande. Die Einkanalmaschine blieb
noch regungslos. Die Zweikanalma-
schine erbrachte dabei
anfangs nicht immer den
Endausschlag, aber immerhin, es tat sich etwas.
Wurde
jedoch der Sender um 90° gedreht, waren keine Servobewegungen
mehr möglich. Laien-
haft gesehen kam
mir vor, dass der Sender eine zu geringe Sendeleistung
bringt, oder der Emp-
fänger zu schwach beim
Empfang der Signale ist ?
Als die
Schalterstellung EIN am Sender wieder normal funktionierte und der
Sender auf kurzer
Reichweite arbeitete, wurde mehrfach versucht,
die Funktion der Rudermaschinen zu erproben.
Die
Zweikanal-Rudermaschine hat sich
"eingelaufen" und bewegte sich bereits,
doch erst nach
mehrfacher händischer Bewegung des Ruderhorns, war dann endlich auch der volle Endausschlag
erreichbar.Bei der
Einkanal-Rudermaschine war ein Kontaktproblem vom
Verkäufer in Aussicht
gestellt worden. Während der
Suche nach dem Kontaktfehler wurden alle Kontakte mit
Kontakt-
spray Tropfen benetzt. Auch auf der
Oberseite befindet sich eine Cu-Kontaktfeder, die ebenfalls
an der Eintrittsstelle ins Gehäuse einen Tropfen
abbekam. Es schien so zu sein, dass dieser
Federkontakt als Stromleiter arbeitet und siehe da, das
Servo begann danach zu funktionieren.
Ergebnis
und Folgen
Bedingt durch die geringe
Reichweite konnte ich die Anlage über den
Verkäufer zur Verbesse-
rung an einen Techniker
senden. Der Experte informierte mich, dass die 60 Jahre
alten Leistungs-
transistoren nicht mehr richtig funktionieren
(Krostallbildung) und nicht mehr erhältlich sind. Ein
Ersatz
durch moderneTransistoren ist möglich, was
aber eine Anpassung anderer Bauteile, kurz,
einer neuen
HF-Printplatte bedarf, die er anfertigen muss und kann.
Nach
weiterer Untersuchung stellte der Elektroniker fest, dass der
mit dem 40mHz Sender ver-
kaufte Empfänger ein 27mHz
Pendelaudion Empfänger
sei, der
bei kurzem Abstand vom 40mHz
Sender eben auch funktioniere.
Das sei eine Folge der Pendelaudion Technik (ohne
Quarz), bei
der die Empfänger quasi "alles hören"
und daher ein wenig reagieren.
Unter meiner anfänglichen
Befürchtung, dass die Reparatur des 40mHz-Sets nicht
wirklich gelin-
gen würde, sah ich mich nach
einem Empfänger um, den ich für meinen vorhandenen 27mHz
Sender verwenden könnte, den ich der Schönheit
wegen, als funktionstüchtig einschätzte. Ich fand
sogar, ganz außergewöhnlich, eine 3K
Grundstufe in einem Schiffsteile-Konvolut, kam aber
dumm
nicht auf die Idee, dass es ein 40mHz
Empfänger sein könnte. Die 40mHz-Anlagen wurden weniger
oft verkauft als die 27er Anlagen, daher kam es zu
meiner fälschlichen Annahme, ich hätte ein
27mHz Empfänger
gekauft.
Nach
Überarbeitung durch den Elektroniker wurde klar und
möglich, die beiden Empfänger den
jeweiligen Sendern
zuzuordnen, wie in der Folge beschrieben wird. Mein
27mHz Emfpfänger zu
meinem 27mHz Sender, und
der 40ziger Empfänger zum 40ziger Sender.- Glück muss
man haben.
|
Mein
erster 27mHz Sender und ein
fragwürdiger Empfängerkauf (Set
Nr 2) |
Just zu dieser Zeit, tauchte im Internet in einem
Konvolut eine vermuteter 3 Kanal Telecont 27mHz-
Empfänger
Grundstufe auf, die
nun mit dem von mir schon Jahre davor für die Sammlung
gekauften
27mHz 9K Sender verknüpft werden könnte. Der
Werkbank Test zeigte ebenfalls das selbe
Reich-
weitenproblem wie beim vermeintlichen 40mHz-Empfänger
auf. - Wie zuvor erwähnt, kam es zu
einem Empfängertausch,
der mir einen 27mHz Empfänger bescherte.
Telecont Empfänger Grundstufen sehen
äußerlich
(leider) gleich
aus und sind meist nicht gut leserlich
oder
garnicht beschriftet, sodass es rasch zu Verwechslungen
kommen kann.
Der Elektroniker beglückwünschte
mich nach einigen Tagen, da er meinen 27mHz 9K Sender mit
neuem HF-Teil
erfolgreich ausgerüstet hatte. Weiters wurde
geklärt, dass er die Empfänger ausge-
tauscht
und auf den jeweiligen Sender abgestimnmt habe. Außerdem informierte mich der Elektro-
nikexperte,
dass mein vermeintlicher 27 mHz Konvolut-Empfänger im Wasser gelegen haben
muss
und auf den ersten Blick irreparabel
ausgesehen habe. Doch er konnte ihn wieder reaktivieren. Die
Sendeleistungen
der umgebauten HF-Platinen entsprechen nach der
Reparatur den Werksangabe
gemäß
der Betriebsanleitung.
|
|
|
 |
 |
 |
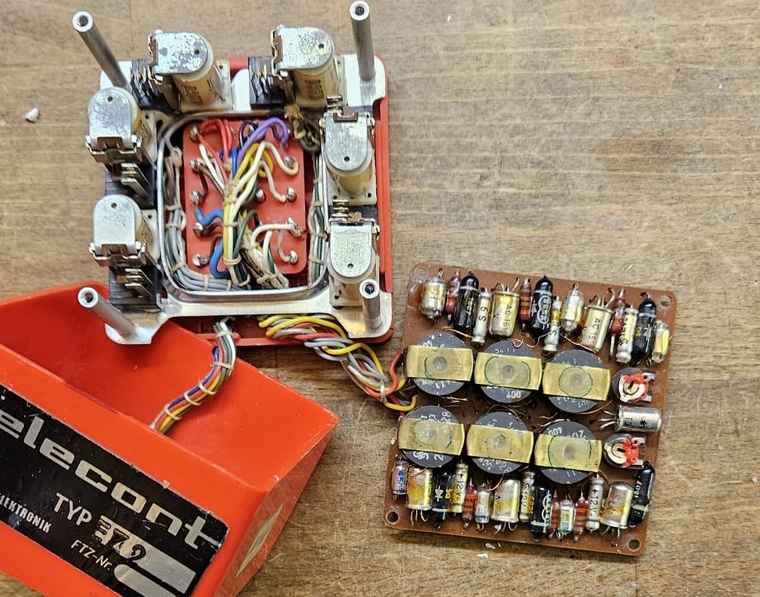
3K Sender S1, Empfänger E1, Servos
Funktionsvideo |
Ansicht des Senders |
die Technik |
neuer HF-Teil ist im 3K Sender eingebaut |
 |
 |
 |
 |
|
die
neue HF-Platine |
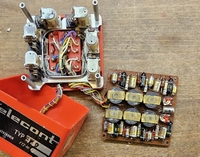
Blick in den Empfänger |
solide Technik |
Empfängerelektronik wird überarbeitet |
 |
 |
 |
 |
|
aus Konvolut stammendes Telecont Set schmutzig, im
Ankaufstzustand |
3K-Empfänger E1 02 = 27mHz gereinigt
(jedoch
40mHz) |
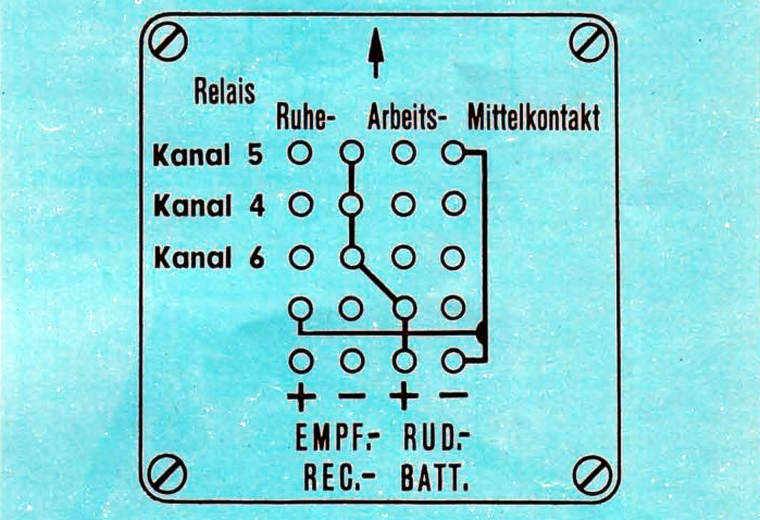
Beschaltung Empfänger E1 |
Kinematic !-Kanal-Rudermaschine für Auto- und
Schiff
Funktionsvideo |
|
|
|
|
|
|
Telecont S 2 - 9K
Sender 27,12 mHz mit 3K Empfänger E1 und 2K Stufe
E3 (Set
Nr 2) |
Wie schon zuvor beschrieben, konnte der
Elektroniker zu meinem 27mHz Sender den überholten
27mHz Empfänger
verwendbar
machen. Damit kann ich mit meinem 9K Sender nur meinen 3K
Empfangsteil betreiben. Meine Suche
nach einem 9K-Empfänger läuft daher weiter, um irgend-
wann mehrere
Funktionen steuern zu können
Der Grund für
mein großes Interesse an einer funktionierenden Telecont
Steuerung ist, dass ich
damit erfahren möchte, wie
diese seltene Anlage die Tipp-Impulse in Servoausschläge umsetzt,
und wie man den Sender halten muss, um damit
ordentlich tippen zu können. - Bedauerlicher
Weise sind heute kaum noch Menschen anzutreffen, die
ehemals solche Tipp-Anlagen betrieben
haben, wobei der Personenkreis bei Telecont scheinbar noch wesentlich
geringer ist. Gerne hätte
ich aus erster Hand
davon erzählt bekommen,
um mich danach orientieren und erfreuen zu können.
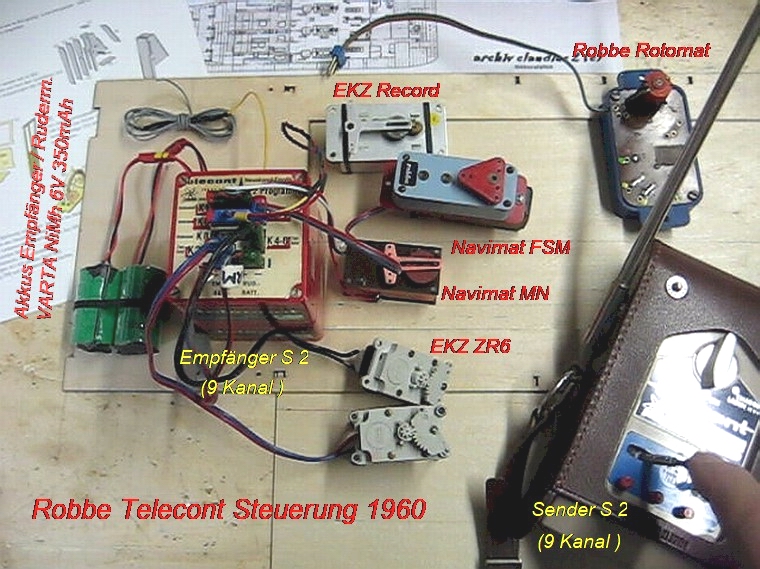
Verlauf
der Erprobung meines 9K-Telecont 27mHz Senders
mit dem 3K Konvolut-Empfänger
Der 9 K-Sender funkt mit 27,12 mHz und
mit 250mW Sendeleistung. Die Stromversorgung erfolgt
durch einen VARTA Akku mit 225mAh (mit10
NiMh-Zellen), also mit
12V.
Der Sender hat einen Kreuzknüppel, einen
Zweirichtungs-Knüppel und drei einzelne Taster. Zu die-
sem Sender gab es anfangs leider
nur eine 3K-Empfänger Grundstufe E1. Damit kann im
Schiff
mit einer Einkanal Kinematic
Rudermaschin das Ruder und mit Kurzimpulsen der Motor
umge-
schaltet werden. Es könnten noch zwei
inkanalmaschinen angeschlossen werden, um weitere
Funktionen
zu steuern. Mit dem Einkanal Rudermaschinen ist duch die
Tastenbetätigung nur die
Funktion zB
Links-Mitte-Rechts-Mitte-Links usw., oder ähnliche
Anwendungen, steuerbar. Mit einer
Zweikanalmaschine
kann hingegen mit dem Knüppel Rechts-Mitte-und wenn
gewünscht wieder
Rechts gesteuert werden. Mit
selbstneutralisierenden Rudermaschinen ist damit ein
brauchbares
Steuern möglich.
Die schon vorher angeführten Reparaturen brauchten natürlich einige Zeit und ebenso
die Meldun-
gen von Reparaturerfolgen. Da ich
zu diesem Zeitpunkt noch befürchten musste, dass man das
40ziger und mein 27ziger Set wohl kaum
vollständig wird reparieren können, sah ich mich nach
noch einem
anderen Telecont-Set um, welches eventuell als Ersatz oder als Teilespender
verwen-
det werden könnte.
Schließlich hatte ich
wieder Glück und ergab sich der Ankauf einer
2K Ausbaustufe, wodurch meine
27mHz Anlage deutlich aufgewertet wurde und
nun 5K zum Steuern anbietet. Damit
kann ein Kreuz-
knüppel und ein Taster am 9K Sender zur Steuerung
verwendet werden. Damit können zwei Zwei-
kanal- und
eine Einkanal Rudermaschine betrieben werden.
|
|
|
 |
 |
 |
|
Telecont 9K Set 27mHz mit Empfänger |
mein Sender (~1962, betriebtauglich) |
das Innenleben des Senders |
Betriebszustand |
 |
 |
 |
 |
|
Knüppel wird bewegt |
|
|
Sender in der Originalverpackung |
 |
 |
 |
 |
|
Balancerkabel wird vorbereitet |
Vergleich 12V Akku und 3S Akku |
Lage der Ladebuchse |
das spezielle Ladekabel |
|
|
 |
|
|
|
3K-Empfänger E1 02 = 27mHz (eigentlich aber 40mHz) |
Ansichten im Ankaufszustand |
Blick in den Empfänger |
Elektronik der 3K Empfänger Grundstufe |
|
|
|
|
|
|
Telecont S2
- ein weiterer 9K Sender und 9K Empfänger taucht
auf (Set
Nr 3) |
Überraschung!
- Unglaublich aber wahr, ich fand nach jahrelanger
Suche
doch plötzlich ein komplettes 9K-Sender mit Empfänger-Set,
welches sich später allerdings als
desaströs erwies, wie beschrieben
wird.
Nachdem zu
der Zeit noch nicht abzushen war, ob die laufenden Re-
paraturen erfolgreich sein werden, kaufte ich das plötzlich aufge-
tauchte, relativ günstige (180.-€ ?) 9K Set.
Alles aus einer Hand und
daher anzunehmend frequenzgleich,
beflügelte meinen Entschluss.
Wenn die Anlage funktioniert, wäre das ideal
gewesen, denn dann
könnte sie sofort in einem Schiff eíngebaut werden. Mit nützbaren 9
Kanälen, das sind
6 Funktionen, könnten mehrere Fahrfunktionen,
vor allem eine Geschwindigkeitsregelung
und eventuell auch Sonder-
funktionen gesteuert werden.
Erprobung
des Neuzugangs mit
demotivierendem Ergebnis
Nach dem Eintreffen wurde
von mir die Anlage gesichtet und es han-
delt sich eindeutig
um eine 27mHz 9K Anlage. Freude kam auf.
Im
Hinterkopf bestanden Zweufel, denn wie vom Elektroniker
erklärt,
sind alle Germanium-Transistoren nach
den vielen jahern defekt.
Warum sollte es bei
dioeser anlage anders sein. - Aber die Hoffnung
stirbt
zuletzt, sagt man......
Das
Sendergehäuse wurde geöffnet, um den neuen 12V Akku einzu-
bauen
und anschließend eine Erprobung vorzunehmen. Weil jedoch
das Minus Kabel
des Akkuanschlusss fehlte, muste der
HF-Teil mit dem
Quarz gelöst werden, damit das
neue Kabel
angelötet werden konnte.
Der Schreck
nach dem Abheben der Platine war groß, denn die
Leiter
bahnen am HF-Teil waren grünspanig oxydiert.
Sie wurden gereinigt
und durchgehend
verzinnt. Die zuvor abgelöteten Anschlüsse
am HF-
Teil wurden wieder angelötet, der Akku
angeschlossen und ein Sender-
test mit meinem
primitiven "yA-Messgerät"
durchgeführt. Das Mess-
gerät zeigte jedoch
keinerlei Regung, nicht die kleinste Bewegung des
Zeigers.
Auch dieses
komplette Set
wurde daher zum Techniker geschickt, da
anzunehmen war, dass neben dem Sender auch auch der Empfänger
Schaden
haben würde.
Die erste Durchsicht meines Experten endete ernüchternd, denn
der
Sender sei gänzlich tot. Noch dazu gäbe es
Probleme bei den Tonge-
neratoren, die für den Betrieb
der Steuerung entscheidend sind, da
durch sie die
einzelnen Kanäle und
damit die Rudermaschinen aktiviert
werden. Nach
einer Woche meldete er sich jedoch wieder und ich
erfuhr, dass er eine neue Sender-HF-Platine angefertig hat und er
auch die
Tongeneratoren im Empfänger wieder in Funktion versetzen
konnte.
Bei seiner Arbeit entdeckte er, dass zuvor jemand
krass an der Elek-
tronik der 6K
Ausbaustufe herumgebastelt
hatte, wodurch weitere Fehl-
funktionen
entstanden seien. Er berichtete,
dass er die 3K Emfänger
Grundsstufe wieder
reparieren konnte, aber durch der Tausch von
Tran-sistoren und
Bauteilen eine neue Sender HF-Printplatte notwendig
geworden war. Im Moment arbeite er daran, die
6K-Empfängerausbau-
stufe aufzuarbeiten und
dort die Transistoren und Bauteile prüfen und/
oder auszutauschen. Allerdings
waren in der Ausbaustufe vom Vorbe-
sitzer wirre
Eingriffe vorgenommen worden, die Zweifel an der vollstän-
digen Reparatur aufkommen lassen.
Die Schwierigkeit bei
dieser Empfänger-Arbeit bestehe darin, dass
die mit Klebstoff überzogenen Bauteile
(Vibrationsschutz) oft erstmal
schwierig aus dieser Masse
herausgelöst werden müssen, ohne dane-
ben
liegende Bauteile zu beschädigen. Zum Glück
waren die zu erneu-
ernden vertrockneten
Kondensatoren, Widerstände, Elkos
erhältlich.
Ich konnte im Moment nur
hoffen, dass er Wege findet, die erheblich-
en Fehler zu beheben
und ersuchte ihn darum. Es enstand bei dem
Kontakt mit
ihm der Eindruck, dass er nicht gleich aufgibt,
wenn er ein
Problem erkannt hat. Daher hoffete
ich, dass die Anlage wieder ver-
wendbar wird.
Nach seinen nächsten
Informationen und den mitgeschickten Bildern
von der Reparatur,
hatte in der 6K-Stufe ein grober Eingriff eines
Nichtkönners stattgefunden, der auch nicht
zum Erfolg geführt hat.
Ich vermute, dass
dieses Set daher beseite gelegt worden ist und an
jemanden, also mir, "verkauft" wurde. Richtig ist,
dass im gefinkelt for-
mulierten Angebot nichts
von einer Funktion geschrieben stand. Ich
habe das schon beim
Kauf vermutet, doch gehofft, es werde
schon
nicht so schlimm sein.- Nicht einmal
mein im
Wasser gelegener Emp-
fänger hatte dem Techniker soviel Arbeit bereitet,
wurde mir berichtet.
Mein genialer Elektroniker schaffte es
schließlich doch, alle 3 Anlagen
aus den Jahren
nach 1960 wieder brauchbar zu machen.
Bedauerlicher Weise ließen sich im 6K Aufsatz nurmehr 5 von 6 Funktio-
nen reaktivieren, da eine
Einkanal-Tastfunktion vom Vorbesitzer mecha-
nisch
irreparabel devastiert worden war.
Ein Tastkanal ist also tot. Damit
kann ich aber gut leben.
Am Sender kann
mit dem Vierkanal-Steuerknüppel
K6-4 und K9-7, mit
dem Zweikanal-Knüppel K3-2 und
mit den zwei von drei Tastern von
K5 und K1 gesteuert werden.
K8 ist tot.
Damit ist mit der Steuerung der Betrieb meines Schiffes mit
bis zu fünf
Rudermaschinen ausreichend möglich, worüber ich sehr froh bin.
Nach
einiger Zeit und vielen Tests der Steuerung für den
Einbau in das
Schiffsmodell, fiel ausgerechnet ein Kanal zur Drehzahlsteuerung plötz-
lich aus,
sodass der Sender nochmals zum Elektroniker musste. Nach
Beschaffung
und Tausch der speziellen Transistoren war der Fehler
wieder behoben.
An dieser Stelle möchte ich mich beim Elektronik
Spezialisten herzlichst
für seine Mühe mit meinen
Steuerungen bedanken!
Wie der Einbau
dieser Steuerung und die Anpassungen von Ruderma-
schinen
im Schiffsmodell durchgeführt
wurde, ist auf der
Seite Liberty
nachzulesen.
Nachfolgend wird über die verwendbaren
Rudermaschinen und deren
Technik und Funktion
berichtet. Ohne diese Informationen ist eine Ver-
wendung
einer Telecont Tipp-Steuerung (und andere Anlagen) nicht
effizient möglich.
|
9K-Sender
S2 und 9K-Empfänger E2
der Sender ohne Etui

Blick
auf ausgebaute HF-Platine

9K-Empfänger Typ E2
(3K Grundstufe und 6K
Ausbaustufe)

"Prograqmm Karte"
ein Blick in die &K-Ausbaustufe
das Fernsteuerset ist einsatzbereit
Funktionsvideo |
|
|
|
 |
|
|
der zweite 9K-Sender mit 27mHz.... |
Blick ins Sendergehäuse |
gereinigte Leiterbahnen vor dem Verzinnen |
die neue HF-Platine |
|
|
|
|
|
|
|
|
 |
|
|
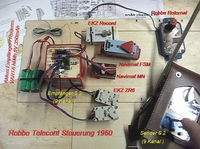
die Programmkarte des Vorbesitzers |
Beschaltung Empfäönger E2 |
nurmehr Kanal 4-6, 7-9 und 5 repariert |
zerlegt inb zwei Teile |
|
|
 |
 |
 |
|
Kinematic ! Kanal-Rudermaschine für Auto- und
Schiff
Funktionsvideo |
Robbe Rotator-Fahrtrichtungsumschalter |
EKV Rekord
|
Robbe Navimat MN |
|
|
|
|
|
|
Rudermaschinen,
deren Technik, Anwendungen und Reparaturen |
Funktion von Rudermaschinen und ihre Verwendungsmöglichkeiten
Schon eingangs war zu sagen, dass Robbe beim Telecont Empfangssystem,
konträr zu
Graupner Steuerungen, die Verwendung
von Fremdfabrikat-Rudermaschinen vorgesehen hat.
Bei
Telecont wurde das auch durch die getrennte Stromversorgung der Rudermaschinen
im
Empfänger ermöglicht, wobei jedoch alle angeschlossenen Rudermaschinen mit der
gleichen
Spannung, 6V oder 2,4V (bei Graupner
RM), arbeiten müssen.
Alle
Tipp-Rudermaschinen von
Graupner oder anderen Herstellern, zB. EKV, usw. können nach
Steckersystemanpassung
verwendet werden.- Auch
bei den Varioton Empfängern kann mit Zwischenkabeln
Fremd-
marken Rudermaschinen verwenden, wenn
sie mit 2,4V arbeiten.
Das Telecont System hat den Vorteil,
dass nach meinen derzeitigen Erfahrungen, die gegen-
über meinen
wenigen verfügbaren Robbe- und
Telecont-Servos, die meist zarter und genialer
gebauten
und leistungsfähigeren Graupner
Rudermaschinen wie
Bellamatic, Servautomatic,
Trimmomatic, Variomatic, der FahrtreglerUnimatic, Duomatic, Kinematic etc., bestens
ver-
wendbar sind.
Einkanal-Rudermaschinen
Wie im
Funktionsvideo
sichtbar, wird die Einkanal-Rudermaschine
EKV Rekord mit einer
Taste, das ist EIN KANAL, betätigt. Man kann
nur die nachfolgende fixe Steuerfolge steuern:
z.B.: Tasten =
Rechtsausschlag, Taste auslassen = neutral, nächstes Tasten = links, Taste
auslassen
= neutral.- Es ist also nicht möglich, zB.
zweimal links zu steuern. Wird der RM-
Stecker
umgekehrt eingesteckt arbeitet die RM immer aus einer
Endstellung in die andere.
Darüber
hinaus gibt es
spezielle Einkanal-Rudermaschinen von Telecont,/Robbe oder
auch
die Graupner UNIMATIC, die mit ihrem
elektrischen Antrieb eine selbsstätige Neutralstellung
ermöglichen. Mit
speziellen Steuerscheiben können mit
unterschiedlich langen Tastimpulsen,
auch andere
Ruderbetätigungen erfolgen.
Die Graupner
KINEMATIC Einkanal-Rudermaschine kann neben der
Ruderbetätigung mit
gewünscht langen
Ruderausschlägen, aber wieder nur hintereinander re- li-
Mitte-re- li usw.
und zusätzlich mit kurzen Tastimpulsen, eine
Elektromotor-Schaltung Vorwärts - Aus -
Rück-
wärts - Aus -, ausführen. Das
funktioniert, ist aber eine Notlösung für Anlagen
mit wenigen
Steuerkanälen und für Schiffe zu sehen.
Von
Robbe gibt es für Umpolung von Gleichstrommotoren den
Rotator, der zwar riesig groß
baut, aber auch
heute noch exakt funktioniert, wie ich erarbeiten
konnte.
Zweikanal-Rudermaschinen
Zweikanal-Rudermaschinen,
wie EKV ZR6 oder Graupner Bellamatic, brauchen ZWEI
KANÄLE zum Steuern, also einen Knüppel mit zwei Richtungen.
Jede halbe Knüppelstellung
von der Mitte weg,
ist ein Kanal. So lange
man den Knüppel in die Endstelle einer Richtung be-
wegt, so
lange führt die Rudermaschine diesen Vollausschlag aus.
Dabei wird bei selbst neu-
tralisierenden
Rudermaschinen in der Endstellung eine Rutschkupplung
( u.U. Fliehkraftkup-
plung) wirksam. Ist der Knüppel
wieder in der Neutralstellung, läuft der Servoarm
meist mit
Federkraft oder elektrisch in die Mittestellung zurück.
Tatstet
man nur ganz kurz, schlägt die Rudermaschine
weniger weit aus. Ein nur kleiner
Ruderausschlag bedarf jedoch großer Fingerfertigkeit!
(Es entsteht eine leicht "eckige" Kurve)
Die
Drehrichtungsumkehr erfolgt bei Zweikanal Rudermaschinen
bei Telecont einfach, in dem
der Servostecker
am Empfänger umgekehrt eingesteckt wird. Das geht bei
Graupner Varioton
Schaltstufen nicht.
Anmerkung:
Das
Tippen zur Erreichung bestimmter Ruderausschläge ist
Übungssache, doch hängt ein
Ausschlag auch
von der Technik der Rudermaschine ab. Die Bellamatic
schlägt unheimlich
schnell aus, sodass geringe
Ausschläge (für mich) schwierig zu erreichen sind. Im
Gegen-
satz dazu schlagen die EKV
ZR6-Rudermaschinen langsamer aus und der Rücklauf mit
Federkraft ist der Ausschlaggeschwindigkeit
nahezu gleich.
Bei der Bellamatic dauert der
Rücklauf fast dreimal so lange als der Ausschlag. Das
werte
ich als sehr unangenehm. Graupner hat
daher für die Bellamatic den
Rücklaufregler ge-
schaffen, der variabel
die Rücklaufgeschwindigkeit maximal nahezu an die
Ausschlagge-
schwindigkeit anpassen kann.
Es gibt auch Zweikanal-Rudermaschinen, die
nicht selbst neutralisieren und in der angesteu-
erten
Stellung verharren, bis ein neuer Steuerbefahl kommt.
Die Rückstellung in die Mittel-
stellung ist schwierig
und beschränkt den Einsatz solcher Servos auf
bestimmte Anwendungen.
Bei Graupner gibt
es folgende Rudermaschinen, welche die angesteuerte
Position halten, wie
zB. die Servoautomatic,
die Trimmomatic
und der Fahrtregler, etc.
Ich habe auch Bellamatic Rudermaschinen auf nicht neutralisierend
modifiziert, doch sind
sie nur für spezielle
Aufgaben zB.für Schaltfunktionen mit kleinen Mikroschaltern
verwendbar,
da nur die Getriebeübersetzung und das Bremsmoment des Motors
die Hebelstellung halten.
Einige Rudermaschinen aus meiner Sammlung sind
nachfolgend abgebildet,
um die Form und
Bauweise zu zeigen.
Beschreibung,
Funktion, Reparaturen und
Arbeiten an diversen Rudermaschinen
Die
mit der 40mHz Telecont Steuerung mitgekauften Rudermaschinen hatten kleine Fehler, die
es
zu finden galt. Durch die Zerlegung konnte ich die Funktionsweise
und den Aufbau der Servos
kennen lernen und
notwendigen
Nachbesserungen durchführen.
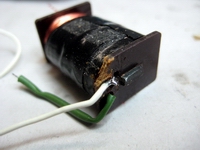
EKV
Rekord, die Einkanal Rudermaschine, hatte ein
Kontaktproblem, da sie nicht immer Kontakt
zur
automatischen elektrischen Neutralisierung hatte. Nach genauer
Durchsicht wurde klar, dass
ein Kontakt von
der Oberseite ins Gehäuse führte, der offenbar
verschmutzt war, was mit einem
Tropfen Kontakspray
behoben werden konnte. Der fehlende Staubshutz
wurde von mir aus 1mm
ABS-Folie nachgerüstet.
Bei einer neuerlichen Funktionsstörung nach
Lagerung wurde nach der Öffnung der Ruderma-
schine
eine seltsame "E-Motorversion" vorgefunden. Hier ist der
Stator Metall und der Rotor der
Magnet. Eine
Wicklung zum Stator entwickelt ein Magnetfeld, welches
den Rotor in Teildrehung
versetzt und nach
Beendigung des Tastimpulses das Servo zur Mittenstellung
weiterlaufen lässt.
Auf der Oberseite des
Rotors ist eine Messing-Kontaktscheibe befestigt, die
gegenüberiegende
Erhöhunen hat, welche eine
entgegengesetzte Drehung verhindern. Auf dieser
Scheibe gleitet
eine Cu-Feder, die den Kontakt
zur Spule herstellt. - Solche Kunstkniffe würde heute
niemand
mehr anwenden, - damals gab es
nichts anderes.
Robbe Navimat
MN, ebenfalls Einkanal Rudermaschine jedoch ohne
Selbstneutralisierung. Im
Servo gibt es eine
Steuerscheibe mit Schleifkontakten, wobei der Kontakt
der Stromzufuhr nicht
anlag. Der Fehler wurde
behoben und ein Servokabel angelötet. Die Rudermaschine
hat nur
geringen Hub und die Funktion ist:
Tasten=1/4 Umdrehung mit Stop des Ruderhebel in Aus-
schlagstellung
re., nächstes Tasten= wieder 1/4 Umdrehung - Stop, also
Hebel in Neutralstellung,
neuerliches Tasten= wieder 1/4
Umdrehung mit Hebelausschlag li., usw.
Robbe Navimat
FMS, das ist eine mit Federkraft selbst neutralisierende
Zweikanal Ruderma-
schine, ähnlich der Bellamaitc, die
vorerest einseitig nicht richtig neutral stellte.
Nach der Zer-
legung war kein offensichtlicher Fehler zu
erkennen, doch nach mehrfacher Betätigung
wurde
klar, dass es nur an der Fliehkraftkupplung liegen
kann.Tatsächlich läuft das große Servo nach
der Reinigung der Fliehgewichte und dem
Kupplungsgehäuse mit Waschbenzin einwandfrei.
Robbe
Rotator, eine große Einkanal Schalt Rudermaschine, die
mit Umschlatkontakten bestückt
ist. Laut der Katalogbeschreibung kann man
damit vorwärts-aus-zurück-aus-vorwärts- schalten.
Doch wie das
möglich ist, steht nirgends und BA gibt (gab) es auch keine
mehr. Deshalb wurde
die Lösung
gesucht und gefunden und
am Ende eine
Funktionsbeschreibung erstellt.
Mein
Schaltservo sollte nur mit 2,4V betrieben werden
(ansonsten 6V). Ein Tausch auf einen
6V Motor wäre bei Verwendung mit 6V
Servospannung ratsam, jedoch sind diese Motore sehr
selten
und schwierig zu bekommen.
Die Umpolung funktioniert
konstruktionsbedingt immer einwandfrei!
GR Unimatic
2,4V,
eine der frühen Graupner Einkanal-Rudermaschinen
für viele Einsatzbe-
reiche. Ich habe eine für
die Telecont Steuerung eine Unimatic mit 8-poligem
Steckerkabel
versucht, als Zweikanal- bzw. auch
Einkanal RM abzuändern und mit einem Zwischenkabel
am Telecont Empfänger
angeschlossen. - Für die Verwendung mit der Variophon Steuerung
gibt
die Bedienungsanleitung Auskunft, welche
Funktionen mit den einzelnen Scheiben mög-
lich sind.
Die 7 polige Unimatic befindet sich im
Originalzustand und wäre mit einem Bellaphon/Polyton-
Emfänger
via Steuerscheibe als 1K Rudermaschine noch immer
beeinflussbar. Für meine
Telecontanwendung
wurde ein Zwischenkabel mit Steckern für den Plus-
und Minuskontakt
angefertigt, damit die RM
ansonst im Originalzustand erhalten bleibt.
Mit
meiner neuen, auf Telecont abgestimmten
RM-Verdrahtung,
gehen ursprüngliche Vorteile
der Rudermaschine
mit ihren verschiedenen Steuerscheiben verloren. Sie
wurde von mir zu
einer nicht neutralisierenden
Rudermaschine umgerüstet, die für eher leichte
Anwendungen,
zB. Betätigung Schaltern, eingesetzt werden kann.
(Drehmoment 200cmkg) In den jeweiligen
Tippstellungen
fixiert der Schneckenantrieb den Ruderarm felsenfest.
Wird die RM am
Telecont Empfänger am Zweikanalsteckplatz (es
gibt 1K und 2K-Steck-
plätze) angesteckt, kann mit
einem Knüppel eine gewünschte Zwischen oder Endposition
ein-
gestellt werden, die die dann jederzeit in beiden Richtungen
verändert werden kann. Da die
RM keinen
Endanschlag hat läuft sie bei ständiger
Knüppelbetätigung re-li-re-li-usw. durch.
Würde
es einen mechanische Wegbegrenzung auf der Steuerscheibe
geben, könnte die
Funktion mit einer nicht
neutralisierenden 2K RM verglichen werden. Der Knüppel
von einer
in die andere Richtung bewegt, lässt
die RM in die andere Richtung laufen. In den End-
punkten
würde der Motor dann blockiert werden und Strom ziehen.
Allerdings sieht man an
der Reaktion des
Modells was geschieht und lässt man den Knüppel in der
aktuellen Stellung
aus, bleibt die RM in dieser
Stellung felsenfest stehen. Anders als bei einer
Bellamatic ist der
stehende Ruderarm durch den
Schneckenantrieb fixiert.
Steckt die Unimatic auf einem
halben Einkanal Steckplatz oder einer nur halbseitig
funktionie-
renden Varioton Schaltstufe, kann
sie mit einer Taste (oder halben Knüppekweg)
verstellt wer-
den, wobei bei nur die 1K-Steuerfolge Rechts - Mitte - Links - Mitte -.usw. möglich ist.
GR Kinematic
4,5V,
die mit externer Stromversorgung zu betreibende Graupner Einkanal
Rudermaschine für Schiffe,
arbeitet selbst neutralisierend und kann in
Abhängigkeit von der
Länge der Tastimpulse, nicht
nur zur Kurvensteuerung Rechts-Mitte-Links-Mitte-Rechts-...,
sondern auch zur Steuerung eines Antriebsmotors des
Schiffes verwendet werden. Mit kurzen
Tastungen bewegt sich das Ruder zwar auch mit, doch
wesentlich ist die dadurch mögliche
Motorsteuerung beim Rücklauf eines Schaltrades: Motor ein
Vorwärts- Motor aus- Motor ein
Rückwärts- Motor aus- Motor Vorwärts- usw. In
der Betriebsanleitung werden die Möglichkeiten
eingehend beschrieben.
Für die Stromversorgung ist eine spezielle Lösung
mit 4,5V erforder-
lich die in der Betriebanleitung
beschrieben wird.
GR Duomatic
6V.
Diese etwas größer bauende starke und selbst mit
Federkraft neutralisie-
rende Zweikanal Rudermaschine von Graupner braucht 6V
Betriebsspannung und ermöglicht
große Ausschläge mit hohen Stellkräften. Sie verfügt ebenfalls über
eine Rutschkupplung.
Mit großem Glück konnte ich
nach mehreren Jahren Suche eine ankaufen. Sie musste nur
etwas
gereinigt, nachgeschmiert und mit einem
Kabel bestückt werden und wäre einsatzbereit.
GR Servoautomatic
2,4V.
Graupner's wohl interessanteste nicht
neutralisiernde Zweikanal Ru-
dermaschine, die
in Verbindung mit dem Mikro Motor und dessen hoher
Untersetzung, erstaun-
lich hohe Stell-
und Haltekräfte
aufbringt. Um infolge längerer Tastungen das Servo nicht
zu be-
schädigen, ist sie mit einer Rutschkupplung
ausgerüstet.- Dieses Servo eignet sich als
Umpol-
servo, wofür ein gesonderter Umpolsatz angeboten
wurde.
GR Bellamatic
2,4V,
ist die wohl meistgenutzte selbst
neutralisierende Graupner Zweikanal
Rudermaschine. Sie weist
ebenfalls den gleichen Mikro Antriebsmotor auf, der sie
kraftvolle
schnelle Ruderausschläge ausführen
lässt. Sie ist ebenfalls mit einer Rutschkupplung
versehen,
sodass lange volle Ruderausschläge
schadlos möglich sind. Manko aus meiner Sicht ist, dass
die durch Federkraft erfolgende
Neutralisierung des Ruderarmes deutlich länger dauert
als der
Ausschlag. Der Motor bremst nämlich, da er
via Varioton Schaltstufe elektrisch kurzgeschlos-
sen wird.
Den Kurzschluss kann man mit einem Rücklaufregeler
aufheben.
GR
Bellamatic: Umbau in Version nicht neutraliserend - Eigenbau
Da
in meiner Kiste einige defekte Bellamatic
Rudermaschinenteile existierten, kam die Idee
auf, eine Bellamatic auf Version
nicht neutraliserend umzuändern. Die
brauchbaren
Teile-
gruppen
wurden oberflächlich gereinigt und in Einzelteile
zerlegt. Damit kann eine kleine
Rudermaschine
für Umpolzwecke angefertig werden.
Die Entfernung der Rücklauffeder
genügte, um die Bellamatic auch in Zwischenstellungen
stehen lassen zu können. Allerdings sind
dann die Haltekräfte gerig, eben nur so stark wie
Wirkung
des Motorkurzschlusses via Getriebe ermöglicht.
Die Haltekraft in Ruhestellungen ist
abhängig von der vorhandenen Getriebeübersetzung und
der Einstellung
der Rutschkupplung, deren Verstellung keine höheren
Haltekräfte ermöglicht.
Mit etwas Kraftaufwand per
Han oder großem Ruderdrück, kann der Ruderhebel
jederzeit
verstellt werden.
Vom Umbau siehe
Seite mit Bildern und Funktionsvideo:
Bellamatic nicht neutraliserend
GR Rücklaufregler,
beschleunigen bei der Bellamatic den sehr langsamen
Servorücklauf.
Sie werden auf eine Schaltstufeaufgesteckt und
der Servostecker wird in der Buchse des
Rücklaufreglers
eingesteckt. Durch ein im Regler befindliches
Potentiometer kann die Rück-
laufgeschwindigkeit
stufenlos deutlich erhöht werden, sodass sie maximal kaum länger
dauert
als der Ruderausschlag.
GR
Varioprop
2,4V Schaltservo, eine nicht neutralisiernde
Zweikanal Rudermaschine der
besonderen Art, die
ohne mechanischen Anschlag betrieben wird. Der Antrieb
ist fast mit
dem der Servoautomatic Rudermaschine
identisch. Diese Rudermaschine ist nach einer
Ruderwegvergrößerung
(Endanschläge wegfräsen) für spezeielle Anwendungen geeignet,
die via Endschaltern zB. einen Motor und auch
den Rudermaschinenmotor abschalten oder
umpolen
könnte, oder eine Drehzahlsteller Elektronik
antreibt.
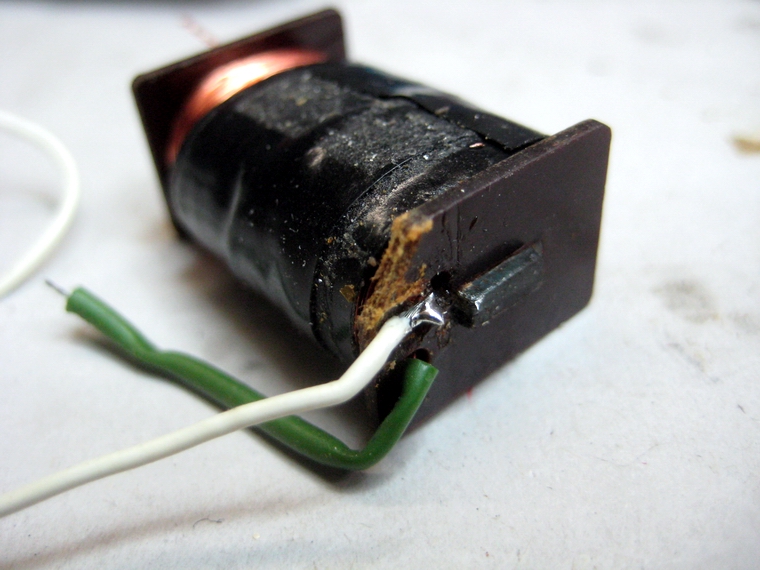
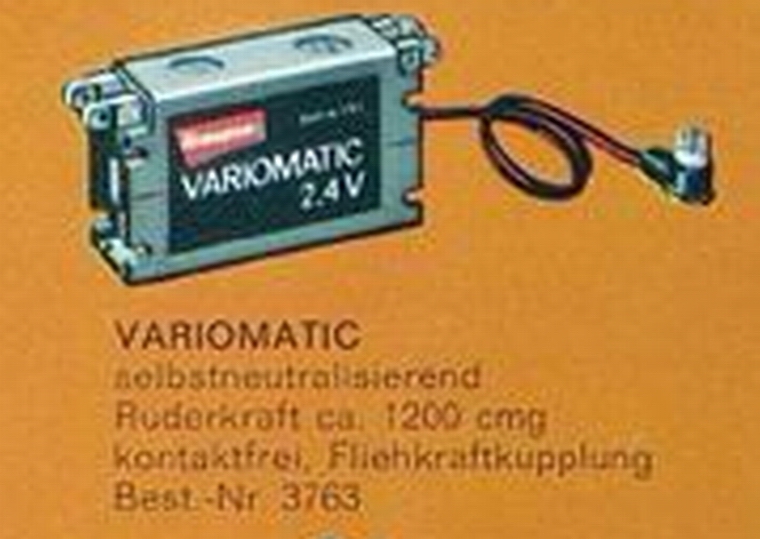
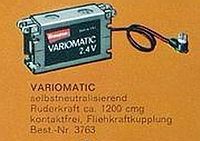
GR Variomatic
2,4V, eine seltene, größere, schnelle und rasch selbst
neutralisierende,
kräftige lineare Rudermaschine mit
Rutschgkupplung. Sie besitzt beidseitig
zwei nutzbare
gegenläufige Schieber und könnte ideal für Querruderbetätigung eingestezt werden.
GR Trimmomatic 2,4V,
wird zur Änderung von Gestängelängen verwendet, damit
eine Fein-
abstimmung, also eine
Trimmung, vorgenommen werden kann. Die Rudernaschine wird
i.d.R.in das Steuergestänge eingebaut und der im
zylindrischen Teil befindliche Motor be-
treibt eine
Gewindestange, die ein Teil besitzt, in dem das
Rudergestänge befestigt ist. Durch
die
Drehbewegung der Gewindeansatzes verschiebt sich die
Gestängeaufnahme wodurch es
zur Längenverändefrung
am Steuergestänge kommt und dadurch ein
Trimmvorgang erfolgt.
GR
Fahrtregler 2,4V, werden meist zur Geschwindigkeitsregelung
in Schiffsmodellen verwen-
det. Durch
einen Micro T05 E-Antrieb wird der Poti Schleifer bewegt und
können an den
Poti Kontakten die Kabel
angelötet werden. Damit kann eine stufenlose
Geschwindigkeitrege-
lung erfolgen. Die
Umsteuerzeit von eioner zur andersn Enstellung dauert
etwa 3 Sekunden..
Youtube-Link
zur Zusammenstellung meiner Alt-Rudermaschinen über ihre
Funktionsabläufe:
Vintage
Rudermaschinen in Funktion
Meine
eigenen Varianten für die Geschwindigkeits- und
Fahtrtregelung in Schiffsmodellen
Mangels Unkenntnis und Verfügbarkeit waren
brauchbare Fahrtregler für die Tipp-Steue-
rungenwie
der von Graupner, kurzfristig nicht auftreibbar und
wurde nach anderen Möglich-
keiten Umsicht
gehalten, die Fahrgeschwindigkeit und Fahrt meiner
Schiffe gesteuert werden
sollte.
Erste Versuche einer Geschwindigkeitsregelung
mit der Robbe Navimat MN Rudermaschine
schlugen krass fehl; - keine Kraft und zu wenig Ruderweg.
Und auch die
Möglichkeit der
Regelung mit einem mechanischen
Graupner Fahrregler scheiterte erheblich an den kraft-
und ruderwegschwachen alten
Rudermaschinen.
Inzwischen fand sich ein
alter
Regler mit
optelektronischer Steuerung
(Fa. Zechzmann, wie
sich herausstellte) in
meiner Sammelkiste, der für meine alten Motore
sicher geeignet wäre.
Die Erprobung wurde erfolgreich mit einer
GR Servoautomatic Rudermaschine durchgeführt.
Dieser Regler samt Rudermaschine baut riesig groß,
ermöglicht aber nicht nur die
Geschwin-
digkeitsregelung, sondern auch den Fahrtrichtungswechsel vorwärts-aus-rückwärts, in jeder
Richtung. In der Mittelstellung gibt es eine
AUS-Stellung.
Allerdings ist die Ansteuerung der Nullstellung, sowie die Leistungstungsdaten ungewiss. Es
gibt keine Daten. Auch das Erreichen der AUS
- Stellung ist mit einer Tipp-Steuerung beson-
ders schwierig, da der
Schaltweg dafür sehr
kurz ist. (Mit heutigen Steuerungen und Servos
ist
das natürlich
kein Probem)
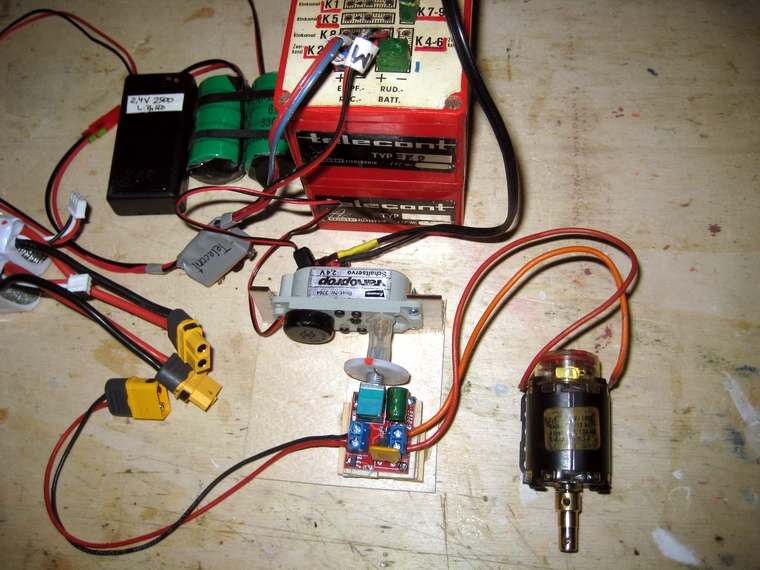
Auf der Suche nach einer
GR Servoautomatic 2,4V fand sich ein
Varioprop Schaltservo 2,4V.
Es hat
keine mechanische Wegbegrenzung (!) und dreht so lange
man Kontakt gibt, relativ
langsam,
aber sehr kräftig. Es hat keine
Rutschkupplung und müsste an den Schaltpunkten mit
Mikroschaltern elektrisch abgeschaltet bzw. umgepolt werden. Im Versuch
konnte jedoch das
Poti des Drehzahlstellers mit einem
Silikonschlauch gekuppelt und in beiden Richtungen
pro-
blemlos gedreht werden.
Ein Versuch anstelle des
Schaltservos eine nicht neutralisierende GR Servoautomatic
Ruder-
maschine zu verwenden scheiterte vorerst am geringem Ruderweg. Daher wurden an der
Servoautomatic die Ruderwegbegrenzungen im
Gehäuse für größeren Servohub ausgefräst,
sodass
der Drehwinkel bis ~240° zu vergrößert wurde.
Die richtige Stellung des
Potis am elektronischen Drehzahlstellelr für die Höchstdrehzahl der
Motore bei
max. 8V, kann durch dessen Verdrehung an die gewünschte
Wirk-Position im Sili-
konschlauch, eingestellt werden.
Durch Hilfe eines Forum Freundes konnte ich
jedoch einen Graupner Fahrtregler bekommen,
der mit
seinem 20 Ohm Widerstrand und mit 10W Dauerbelastung für
meine Motore sicher
und geeigent ist.
Varianten
für Fahrtrichtungswechsel
mit Umpolschaltung
Selbst
wenn die Variante Fahrtregler und elektronischer Drehzahlsteller klappt, ist man noch
nicht am Ziel angelangt. Man benötigt zusätzlich noch einen Umpolschalter, der die Fahrtrich-
tung vor und zurück und
den Stillstand des Schiffes steuern kann.
.)
Rudermaschinen mit
Umpolschalter
Der angekaufte
Robbe Rotator ist
eine sehr groß bauende Einkanal Rudermaschine zum
Umpolen. Nach der Klärung der Anschlüsse von Akku und
Motor ist mein Rotator(mit 2,4V-
Motor!) sehr
gut verwendbar. Hier gibt es das Problem
der Findung der Nullstellung nie und
nimmer.
Etwas kleinere Abmessungen hat die Umpolung mittels einer
später von einem Forum-Freund
erhaltene
Graupner Servoautomatic mit Umpolschaltsatz, die eine
solide und ideale Lösung
mit ausreichend
großer Nullstellung ist. Das kann man gut ertippen, doch
ist das Servo groß
und gewichtig.
Der nächste
Versuch meiner für Telecont modifizierten
Unimatic
funktionierte nicht, da sie zu
schwach war,
einen großen Mikroschalter mit
dem Ruderhebel zu bewegen. Mehrere Versuche
hätten
vielleicht auch zum Ziel geführt, doch gibt es noch
andere Möglichkeiten.
Weiters
wurde eine GR Servoautomatic Zweikanal
Rudermaschine verwendet die zur Betäti-
gung eines
Multiplex-Schiebeschalters erprobt
wurde. Um den für die Umschaltweg erforder-
lichen Ruderweg von ca. 180° zu
erreichen, wurde an dieser Rudermaschine der
Anschlag
des Ruderhebels im Gehäuse vergrößert. - Die
Erprobung verlief erfolgreich, wenngleich
die Dauer der Tippung
von einer Endstelle in die Nullstellung gewöhnungsbedürftig
lange 3
Sekunden dauert.
Das Erreichen der Nullstellung ist etwas leichter möglich,
allerdings sind die sich aus der An-
ordnung ergebenden Abmessungen
sehr platzraubend. Auch nur eine Notlösung.
Beim weiteren
Versuch eine möglichst kleine Umpol-Rudermaschine zu
bauen, griff ich auf
eine Bellamatic zu.
Allerdings musste die Rudermaschine auf nicht
neutralisierend umgebaut
werden. Das gelang
einfach durch Entfernen der Rückstellfeder. Die Rudermaschine
wurde
in eine Sperrholzplatte eingeschraubt,
auf der zwei Mikroschalter montiert wurden. Der mittige
Ruderhebelbereich bietet sich optimal
an, um die Hebel der Mikroschalter und die Schalter zu
betätigen.
- Wegen der kurzen Umschaltzeit und
geringer Baugröße kann
die weiniger Platz
benötigende Umpol-Bellamatic vermutlich irgendwann gute Dienstre leisten.
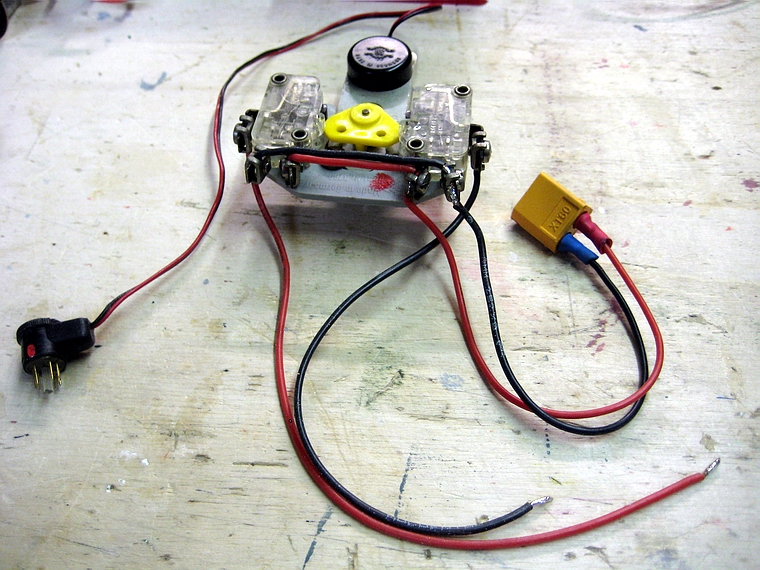
.)
Versuch
Graupner 20A Leistungsschalter
Eine weitere Möglichkeit wäre ein Gaupner 20A Leistungsschalter, der mit einem
2,4V
Micro C 05 Linear Servo mit Schiebern geschaltet werden
muss. Ob sich dafür eine ver-
wendbare nicht
neutralisierende 2-Kanal-Rudermaschine in Baugröße
des Micro 0,5 findet,
war vorerst fraglich?
Diese
C 05-Variante konnte später durch Änderung des
Servoanschlusses direkt an einem
C05-Servomotor
verwirklicht werden. Der Schalter mit dem eingebauten
Servo funktioniert,
ist leichtgewichtig und
problemlos unterzubrignen.
.)
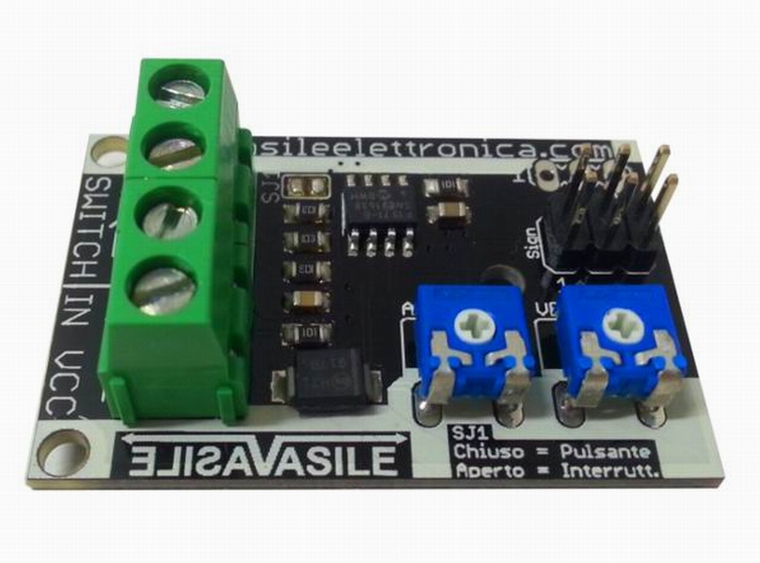
NEU:
Eigenentwicklung mit Tipp-Elektronik
durch Verwendung von
heutigen Standard Servos. Zwischenzeitlich
fand sich eine Elektro-
nik, ich nenne sie
"Tipp-Elektronik", die es erlaubt, analoge
oder digitale Standard Servos
durch Tastimpulse
zu steuern. Damit eröffnet sich die Gelegenheit, die Tastung durch
den
Einkanal-Taster am Sender (oder eine halbe
Knüppelfunktion), via Relaisschaltung im
Telecont Empfänger
(oder Varioton-E.) zu realiseren.
An der
Elektronik kann die Laufzeit und der Servoweg eingestellt werden. Neben der Stan-
dard Möglichkeit,
nach jedem Tastimpuls das Servo in die andere
Endlage laufen zu lassen,
erlaubt die zweite
Möglichkeit, das Servo wunschgemäß lange laufen zu
lassen. Dazu muss
entsprechend der
Betriebsanleitung, auf der Elektronik eine
kleine Lötverbindung hergestellt
werden.
Das
Servo läuft jetzt so lange getastet wird mit der
eingestellen Laufgeschwindigkeit. Lässt
man den Taster aus, bleibt es stehen. Beim nächsten Tastimpuls läuft es wieder zurück, eben-
falls so
lang getastet wird. Tastet man zweimal ganz kurz hintereinander, kann die vorherige
Laufrichtung fortgesetzt werden.
Damit ist die Verwendung eines Weichenstellservos
von der
Modellnbahn möglich.
Heikel
ist die Einstellung des mini-Ruderweges, um
Stromverbrauch des Servos in den End-
stellungen
des Mikroschalters zu verhindern. In einer Stellung ist
das zu erreichen, in der
anderen ist Geduld
angebracht, bzw. könnte dort zB die eher nur kurze
Retourfahrt geschaltet
werden.
.)
NEU: Verwendung von Satandard Servos als
nicht neutralisierende Zweikanal-RM
Bei Stadardservos kann deren
Servoelektronik entfernt werden und der Servomotor mit
einem
zweipoligen Kabel mit einem Vatioton-
oder Telecont Empfänger verbunden werden.
Die Standardservos
haben hohe Stell- und Haltekräfte, die sie für viele
Zwecke verwendbar
machen.
Solche
Servos können die Graupner Servoautomatic Rudermaschinen
ersetzen.- Die 4,8V
Servos geben gering
langsamere Stellgeschwindigkeiten ab, die rascher als
bei der Servo-
automatic sind, aber ausreichend
starke Steuer- und Haltekräfte bieten.
.)
Steckerkabelprobleme:
Anfertigung von Anschlusskabeln
Der Nachteil an der Sache
Servoverwendung ist, dass man kaum mehr zweiadrige Servokabel
mit den Graupner 8-poligen Rundsteckern,
für die Varioton Anlagen beschaffen kann. Es bleibt
also
nur, alte und defekte Bellamatics und
Servoautomatics etc. zu kaufen, von denen man die
Servokabel entfernt und wieder verwendet.
Mangels Verfügbarkeit zweipoliger Steckerkabel ist
die
Herstellung solcher Kabel für den zweipoligen Anschluss
an die Graupner Schaltstufen
als Notlösung
erforderlich.
Achtung:
Die Rundstecker-Servokabel der Varioprop Servos und der Schalterkabel sind im
Stecker
unterschiedlich
verschaltet! (Kurzschlussgefahr)
Um geeignete
Steckerkabel aus anderen 8-poligen Steckerkabeln
herzustellen, müssen die
Hartgummihauben der
Stecker aufgeschnitten und mühsam (bei schlecher
Sehkraft) bis zu
den Steckkontakten am Sockel
ausgefräst werden. Das Öffnen
der Varioprop Servokabel-
stecker ist schwierig und bei
mir vorerst fehlgeschlagen. Die nämlich im Sockel bei
manchen
Steckern befindlchen Verbindungen
zwischen bestimmten Polen sind oft
nicht oder nur schwer
trennbar.
Erst nach
gänzlicher Freischaltung der Steckkontakte können die
für die Varioton Schaltstufen
im Stecker
erforderlichen Zwischenverbindungen einglötet werden.
Zuletzt erst, werden im
Steckerkabel
vorhandene Litzendrähte angelötet. - Mit Vorsicht sollte
vor der Stecker Fertig-
stellung ein Funktionstest
mittels Messinstrumet (Durchläuten) erfolgen! Danach
konnte der
Steckerkopf in Angriff genommen
werden. Doch wie
geht das?
Nachdem die Kabel festgelötet waren,
wurde von mir vom Kabelstück weg ein Kebeband um
den
Steckersockel
herum bis zum anderen Ende am Kabelstück, angeklebt.
Nachdem sicher
war, dass kein Harz zu den
Steckern gelangen kann, wurde der Steckerkopf
anschließend mit
5 Minuten Epoxykleber bist
zur Höhe des Kabelstücks aufgefüllt. Nach dem Aushärten
wurde
der Steckerkopf in Form gebracht und
schwarz angestrichen. Siehe Bild unten.
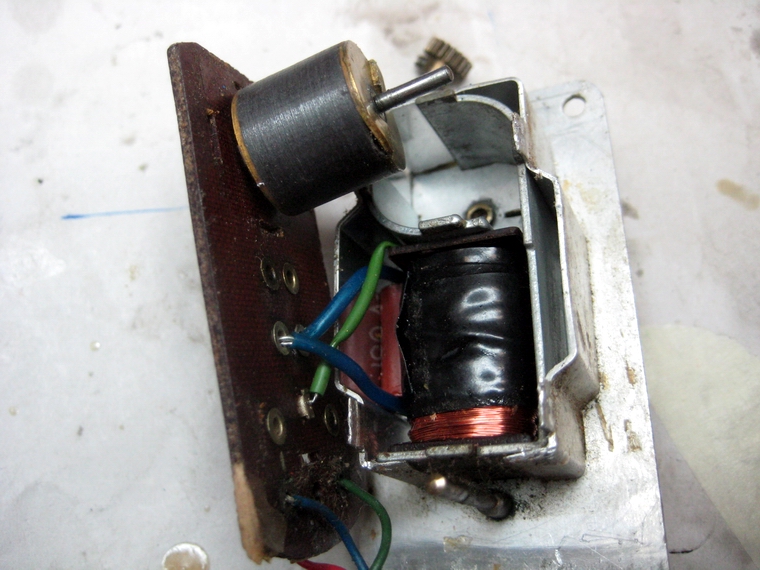
Reparaturbeispiel
Einkanal Rudermaschine EKV Rekord
Die
Rudermaschinen der ersten Zeit hatten seltsame
Antriebsvarianten. Die EKV Rekord
hat keinen
Elektromotor zur Verstellung des Ruderarms, sondern
einen Magnetrotor, der von
einer Spule nach
Stromfluss in Drehbewegung versetzt wird. Siehe dazu die
Bilder unten.
Eine dieser Rudermaschinen
funktioniert nach einer kleinen Durchsicht einwandfrei.
Eine
zweite kam im Kauf eines Konvolutes dazu,
die jedoch bisher nicht regulär funktioniert hat.
Sie
wurde zerlegt, um nachzusehen, woran es liegt, dass sie
sich vom Empfänger nicht an-
steuern lässt.
Legt man Spannung an die Steckerkontakte, funktioniert
sie. Doch im Vergleich
zur intakten Rekord
arbeitet sie anders. Den Grund dafür muss man suchen.
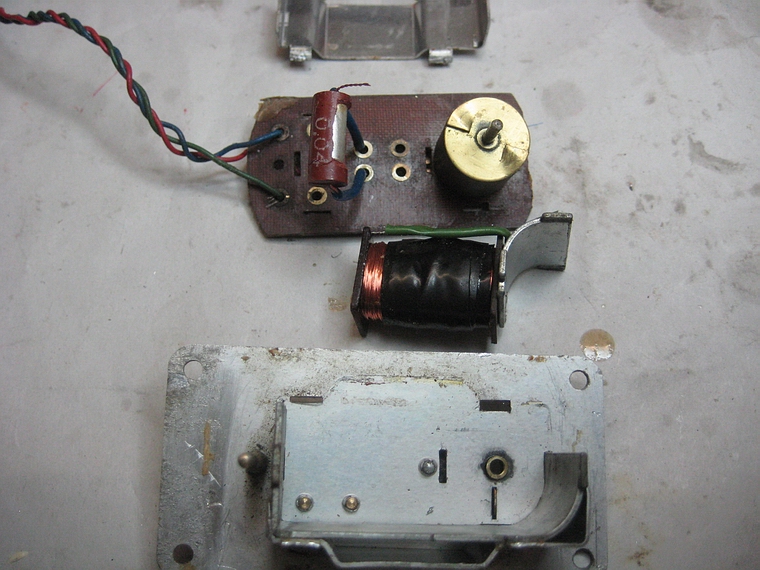
Daher wurde sie zerlegt, wobei man die
Pertinax-Kontaktplatte mit den Steuerkontakten vom
Gehäuse
abheben muss. Dazu ist die Entfernung des kleinen
Antriebszahnrades erforderlich.
Dort ist auf
die kleine Schlitzschraube zu achten, deren
Schlitzbereich heikel zu behandeln ist.
Ist die
Kontaktplatte lose und abgehoben, kann man sie seitlich
wegdrehen, damit der Rund-
magnet aus dem
Gehäuse herausschwenkt.
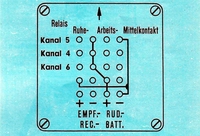
Dann sieht man im
Gehäuse die Spule, die mit einem Kondensator 0.04/160V
verbunden ist,
der mit seinen Anschlüssen
jeweils an einer Kontaktschiene angelötet ist.. Die
Magnetspule hat
3 Anschlüsse, wobei der
Mittelanschluss zum Mittelanschluss der Kontaktplatte
führt. Die bei-
den anderen Anschllüsse sind in die
Kunststoff Überschubrohre des Kondensatorrs mit etwa
1cm langen Anschlüssen
eingeschoben. Sie sind nicht verlötet(!), damit beim
Hantieren die
Spulenkabel nicht beschädigt
werden! Leider riss der kritische Anschluss neben dem
Mittelan-
schluss, ganz knapp an der Wicklung,
sodass das Anlöten eines dünnen Kabels sehr schweirig
und unsicher war. Möglich, dass dort der Fehler
liegt, denn nach dem Zusammenbau funktio-
niert die Spule nur
halbseitig und die Rudermaschien am Empfänger
angeschlossen auch nicht.
Fazit, die Rekord
ist derzeit nicht verwendbar und wird es vermuitlich
weiterhin bleiben.
Zusammenfassung
Bei meiner künftigen Version der Fahrbetriebssteuerung
im Schiff mit
mit mehreren Kanälen
habe ich nicht generell die ehemals bescheidenen Möglichkeiten der Umsetzung
angewendet,
da sie nur sehr
einfache Fahrmodi
erlaubt hätten. Und das, obwohl auch die früheren Modell-
bauer alles Mögliche versucht hatten, zu guten, zu
besseren Lösungen zu kommen.- Ich habe
im
Prinzip die Mühen von früher durch heute
verfügbare
Mittel, zB. durch kleine Elektroniken,
ersetzt.
Wie man aus meinem Bericht sehen kann, war es mit den alten Fernsteuerungen
nicht so
einfach zB. die Fahrrichtung und die Fahrgeschwindigkeit
zu steuern, so wie man es von den
heutigen Fernsteuerungen gewöhnt ist. Umso mehr freut es mich, dass schlussendlich eine
machbare und funktionierende
Telecont-Steuerungsvariante mit Graupner Rudermaschinen für
meine Schiffe gefunden habe.
In wie weit die Verwendung der alten
Steuerungen heute gesetzlich zulässig ist wäre zu
prüfen.
Solange ich niemand durch den Gebrauch
schädige, wird es wohl kein Problem geben. Speziell
beim
27mHz Band sind wir Modellbauer vin den Funkern gestört,
kaum umgekehrt.
Über den Einbau und
Betriebserfahrungen mit meiner Telecont Steuerung in
meinem Schiff Liberty
wird in einer gesonderten
Seite berichtret:
Telecont in der Liberty
|
 |
 |
 |
|
|
GR-Bellamatic |
GR-Unimatic |
Unimatik Steuerscheibe |
GR-Kinematic !
Kanal-Rudermaschine für Auto- und Schiff
Funktionsvideo |
 |
 |
 |
 |
|
GR-Duomatic* |
GR-ServoAutomatic |
GR-Trommomatic* |
GR-Fahrregler* |
|
|
 |
 |
 |
|
Einlanal Rudermaschine EKV Rekord |
Seitenansicht |
Unteransicht mit Kontakten |
der seltsame "Motor" der Steuerscheibe |
 |
 |
 |
|
|
Kontaktplatte abgehoben |
die Teile der Rudermaschine |
die Magnetspule mit angeöotetem Kabel |
|
|
|
 |
 |
 |
|
Robbe Rotator (2,4V) |
Robbe Rotator-Fahrtrichtungsumschalter |
sein Innenleben |
Umpolservo
Funktionsvideo |
|
|
 |
 |
 |
|
Robbe Navimat MN |
Navimat MN Teile |
Steuerscheibe und Schleifer |
Blick auf den Antrieb |
 |
 |
 |
 |
|
Robbe Navimat FMS |
die Fliehkraftkupplung |
Getriebe fertig eingebaut |
GR-Variomatic Servo |
 |
 |
 |
 |
GR-Optoregler+ GR ServoAuitomatic
Funktionsvideo |
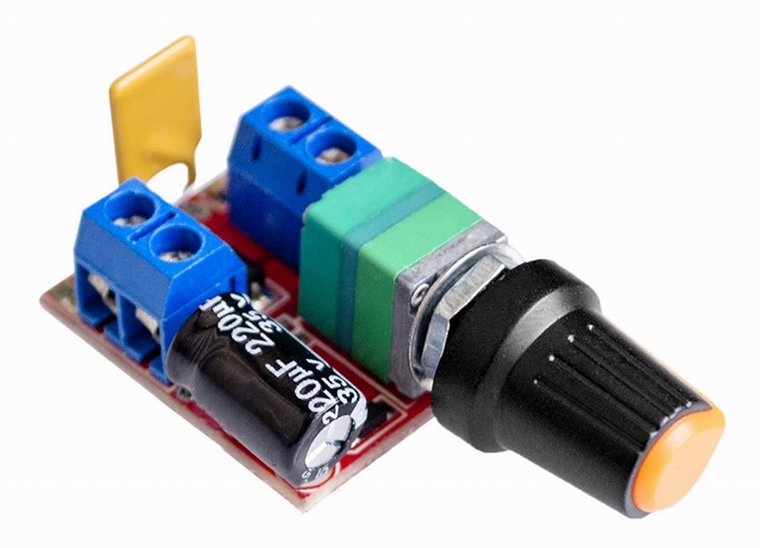
GR-Schaltservo mit Drehzahlsteller |
Drehzahlsteller |
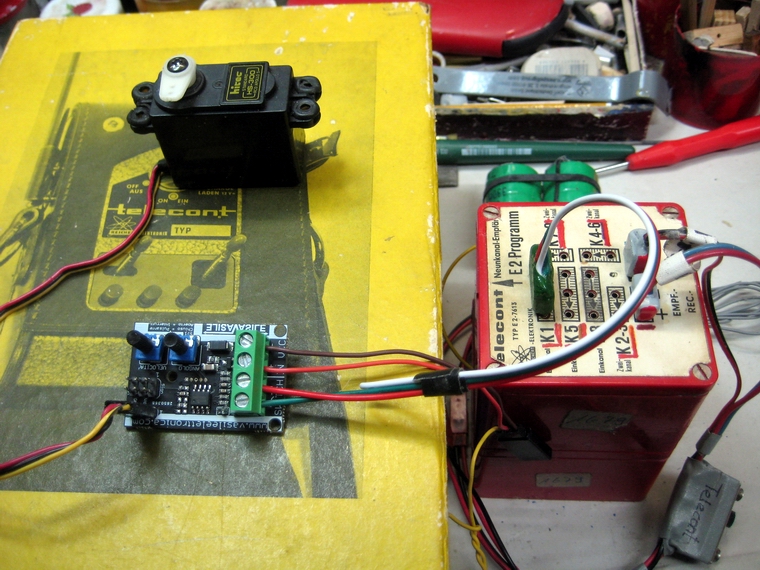
die Tipp-Elektronik |
 |
 |
 |
 |
Standard Servo an Telecont Empfänger
mit Elektronik
|
Tipp-Elektronik mit Umpolservo
Funktiomnsvideo |
Graupner Umpol-Rudermaschine |
Graupner Bellamatic Umbau in Umpolservo
Funktionsvideo |
|
|
 |
 |
 |
|
Bellamatic nicht neutralisierens
Umpolsservo
Funktionsvideo |
Varioprop Servo als Zweikanalservo |
Beispiel: zur 2K Verwendung umgebauter Graupner
Leistungsschalter |
angefertigter Servostecker für Varioton |
|
|
|