| |
|
|
|
|
|
SURCOUF war ein Zerstörer der französischen Marine.
Das Modell im Maß-
stab 1:100 war um 1980 im
Vertrieb von
Firma Steingraeber. Das Schiff kaufte
ich in gebrauchtem
und sehr reparaturbedürftigem Zustand, um es nach Über-
arbeitung wieder fahrbereit zu
machen. Der Preis war höher als es der Zustand
verdiente, aber...na ja. Da das Modell in der
Nachbarstadt abzuholen war, stieg
mein Interesse daran. Darüber hinaus ist es
ein Schiff, das nicht den sonst ge-
bauten deutschen oder englischen Kriegsschiffen nachempfunden
ist, was mir
besonders zusagte. - Mit diesem Zerstörer der
französischen Marine ist ein
noch etwas größeres Schiff in unsere Sammlung aufgenommen worden. Die-
ses
eher seltene Schiffsmodell kann sich mit
anderen messen und erregt auf
jedem Wasser Interesse.
Ein wenig Wissen über die Historie des Schiffs interessierte
mich auch. Dabei
ergab sich, dass das Schiffes
nach einem berühmten französ.Nobel-Piraten
und
später zu einem hohen Marine-Offizier ernannten Mann, benannt wurde.
In den Jahren nach 1951 begann der Bau und 1953
die Inbetriebnahme. Etwa
1961 wurde das
Schiff nach einer Karambolage zum Schiff der Admiralität um-
gebaut.
Bei einem Einsatz 1971 wurde es von einem russischen Öltanker ge-
rammt und abgeknickt.
Während der Abschleppung versank jedoch das Rumpf-
vorderteil. Aus dem Heckteil
wurde danach alles noch Brauchbare ausgebaut
und das Schiffswrack 1972 als Zielobjekt für Raketenbeschuss
verwendet, bis
es schließlich endgültig versunken ist.
Mein Schiff hat auf beiden Rumpfwänden einen vormals
schlecht geklebten
wieder eingerissenen Riss vom Deck bis zum
Schiffsboden hinunter und ich
hoffe das Schiff wird nicht so enden wie das
Vorbildschiff. Viele Transport-
schäden waren
darüberhinaus zubeklagen.
Für die spätere Verwendung wurde ein
Slipwagen
gebaut, damit das große
Modell (und andere),
rückenschonend zu
Wasser gebracht werden kann. Wei-
ters wurde für eine
möglichst staubfreie Aufbewahrung des Schiffs mit seinen
heiklen Aufbauten eine Transportbox
aus Holz angefertigt. Deren Herstellung
wird in der Seite Slipwagen beschrieben.
Technische
Daten:
Länge: 1280mm, Breite: 126mm,
fahrbereit
Tiefgang: ~50
mm,
Fahrgewicht: ~7000g, M 1 : 100,
Propeller: Raboesch Dreiblatt MS 40mm,
Motore:
2 x Monoperm Super Spezial, je 6V, max 3A und 18W Dauerleistung,
gemessene Stromaufnahme por Motor max 3A (das
passt gut),
Leerlaufdrehzahl : 8700 U/Min bei 8,4 V
(2S-Lipo),
Regler: 1 x New Rain 35/160A BEC,
Stromversorgung: 2 x Lipo 2S 2700 parallel, für
Sonderf.: 1 x LiIon
3,6V 2600,
für
Beleuchtung und Radarantennenantriebe, 1 x 5Z NiMh Akku 6V 2000
Fernsteuerung:
Modster xc6 2,4Ghz, mit Akkus
bestückt, Funktionen:
Vorwärts-Stop-Retour,
Ruder, Positionslampen und
Radarantennen, Drehung von 2 Geschütztürmen,
sowie Telemetriesensoren für Akkuspannung und Motortemperatur
|

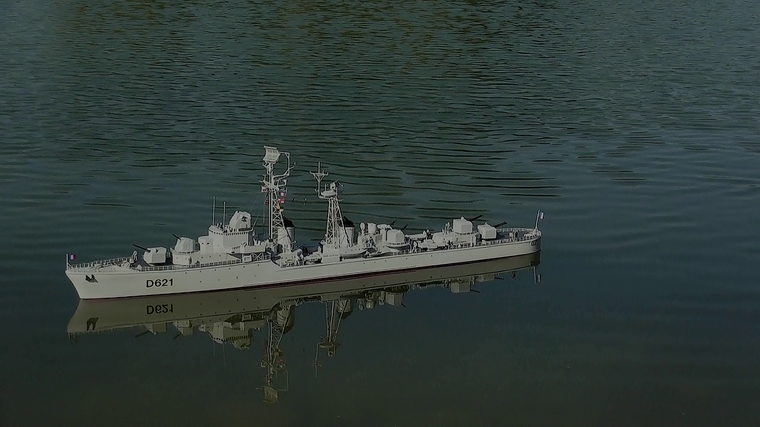
Zerstörer SURCOUF (FR)
Fahrvideo Waldteich

Surcouf beim ersten Auslaufen

Video Nahaufnahme Rumpf

nach Schwimmtest in Wanne fertig

Surcouf 29.9.2023
Fahrvideo Wertfhafen |
Die Bestandsaufnahme, Reparaturen
und noch viel mehr......
Nachdem ich den Zerstörer abgeholt hatte, begann
ich mit ersten "Sicherungsmaßnahmen" zum Erhalt
des Bestandes. Die Beschau des
Modells ergab, dass die Reling an vielen Stellen lose
und defekt
ist
und drei Rettungsboote und Davits teilweise fehlen.
An den Aufbauten und Masten gab es zahlreiche
Schäden
die heikle Reparaturen erforderten. Diverse fehlende Messingteile dafür musste ich anfertigen,
die Rettungsboote werden nachgekauft. Ein Anker war abgerissen und konnte rasch
wieder montiert
werden. Der Ständer des
Schiffs war auch beschädigt und wurde sofort
instandgesetzt. Auch der mit
Servokraft angelenkte hintere Geschützturm und
der vordere, sind nicht ordnungsgemäß
funktionsfähig.
Besonders kritisch sind die
beidseitigen Risse im Rumpf, die sehr unprofessionell geklebt worden
sind. Auch der durch Reaktionshitze eines Klebers verformte Bereich des Schiffbodens in der
Mitte des
Schiffes stört mich, er ist
aber nicht sichtbar und auffällig und bleibt daher weitgehend
wie er ist.
Mich sorgte anfangs besonders die
notwendige
farbliche Ausbesserung des defekten
Rumpfes. Aller-
dings ist das nicht die einzige
Arbeit mit Lackfarbenen, denn das
hölzerne Deck sollte auch dunkel
werden, was auch keine einfache Sache wurde, sollen doch die feinen
Brett-Nuten nicht zugestrichen
werden.
Im Schiffsrumpf
waren etliche
Zwischenplatten eingebaut, die für die Aufnahme von
Servos dienten,
welche über den alten Monoperm
Spezial 6V Motoren befestigt waren. Sie wurden entfernt.
Ein Ver-
such die
Schiffschrauben zu drehen verlief unbefriedigend, da einen Welle kaum drehbar war. Das war
durch das Fett im Stevenrohr entstanden. Nach
dem Ausbau der Welle und einer Säuberung und Ölung
konnte der Mangel rasch behoben
werden. Schließlich wurde auch getestet, wie die Motore
laufen, indem
ich sie kurz an einen 2S Lipoakku
angeschlossen hatte. Beide liefen gut und die Schiffschraubenwellen
begannen sich rasch einzulaufen. Vor der
Jungfernrfahrt werden die Wellen nochmals ausgebaut, gerei-
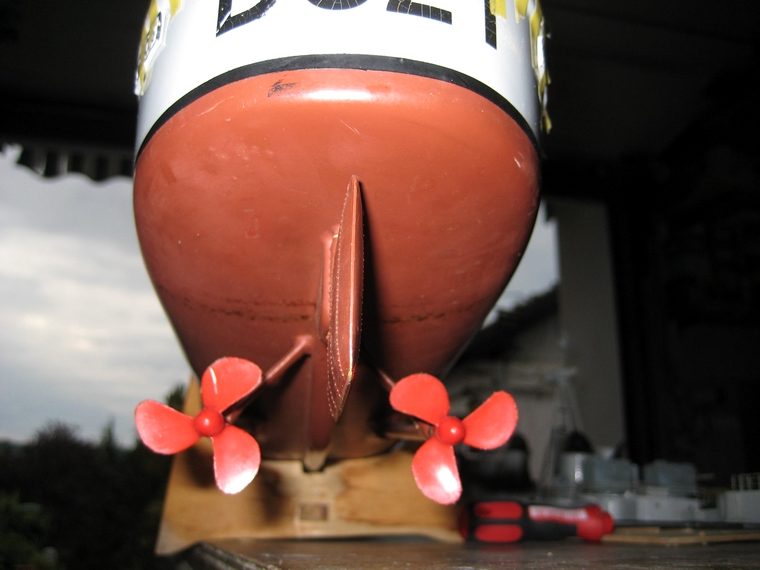
nigt und geölt und wieder eingebaut. Anstelle der 40mm
Dreiblattpropeller sollten Vierblatt Propeller
aus
Messing
mit 35mm Durchmesser montiert werden. Vorweg die
Vierblattprops liefen ausgesprochen un-
rund und
wurden gegen neu beschaffte und rund laufende
MS Dreiblattprops mit 40mm Dm ersezt.
Weiter
problematisch erscheint mir die vom Erbauer eingebrachte Menge an
Bleikügelchen im Kielbe-
reich, die leider nicht
vollständigt verklebt waren, sodass viele bei jeder
Rumpfbewegung herumliefen.
Hier erwartete mich auch wegen des hohen Aufbautengewichtes
noch viel Arbeit. Doch die
Versiegelung
mit PVH-Kaltleim verschaffte einfache Abhife gegen
die frei laufenden Kügelchen.
Bei den
Aufbauten erforderten die vielen
Antennendrähte, Radareinrichtungen usw. viel
Reparaturarbeit,
da viel nachgebessert
oder erneuert werden musste. Größter Aufwand entstand bei der Ausbesserung
nd Befestigung der Relling. Das
bedurfte
viiiiiel Geduld. Die Aktivierung der Radarantennen und
der Posi-
tionslampen wurde später realisiert.
Zusätzliche Lichter an Masten und am Deckaufbau werden
nicht ange-
bracht, da eine nachträgliche
Verkabelung nahezu unmöglich ist.
Die weitere Aufarbeitung des Modellschiffs wird nach dem
folgenden Bilderblock und Text beschrieben.
|
|
Der fertige Zerstörer
SURCOUF |
|
|
|
|
|
|
|
 |
 |
 |
|
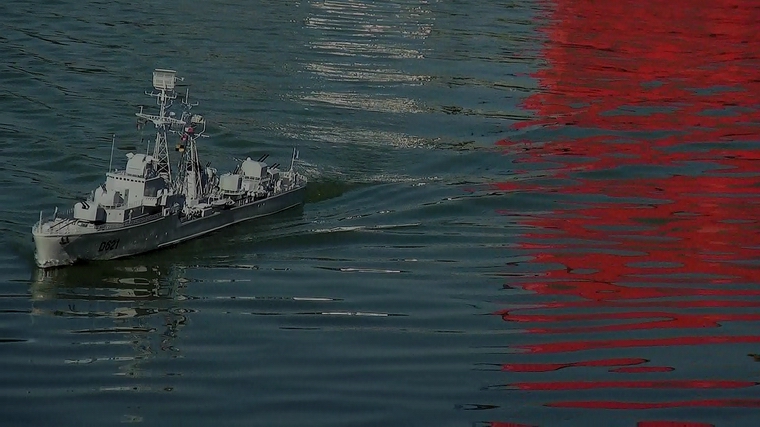
Surcouf auf erter Fahrt |
|
|
|
 |
 |
 |
 |
|
|
|
|
|
 |
 |
 |
 |
|
Surcouf I(m Werfthafen 29.9.2023 |
|
|
Fahrvideo Werfthafen |
 |
|
 |
 |
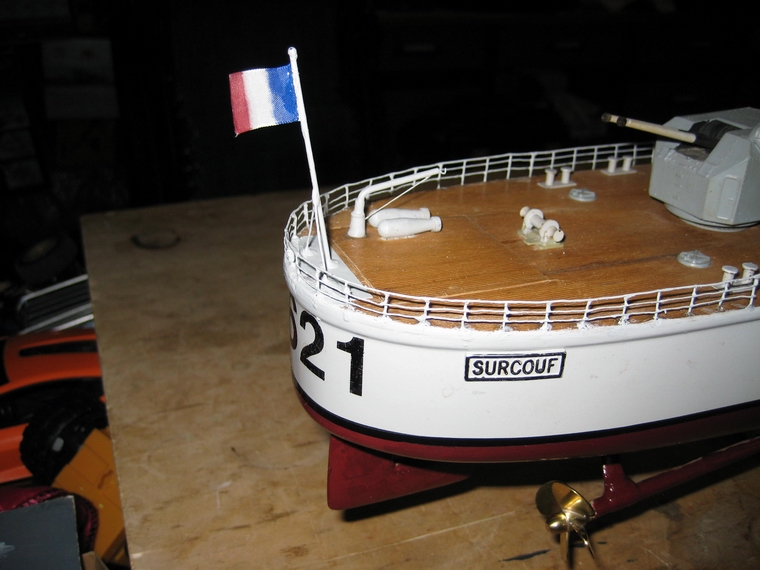
SURCOUF, Zerstörer D 621, FR
(ex Steingraeber
Bausatz) |
|
|
|
|
|
|
 |
 |
|
|
|
Video vom Schiff in Nahaufnahme |
|
 |
 |
 |
 |
|
|
|
|
|
|
Vorbildzeichnungen und das ruhmlose Ende des Vorbildes |
 |
 |
 |
 |
|
Surcouf Anichten |
Surcouf mit voller Kraft voraus (~1953) |
Surcouf nach Zusammenstoß mit .... |
russischem Supertanker |
|
Die Reparatur
und Restaurierung beginnt |
|
|
|
|
|
 |
 |
 |
 |
|
das Schiff vor Arbeitsbeginn |
nachden ersten Reparaturen |
|
|
 |
 |
 |
 |
|
Ansichten des Schiffes |
|
Surcouf nach Zusammenstoß 1971 |
beim Schwimm- und Fahrversuch |
 |
 |
 |
 |
|
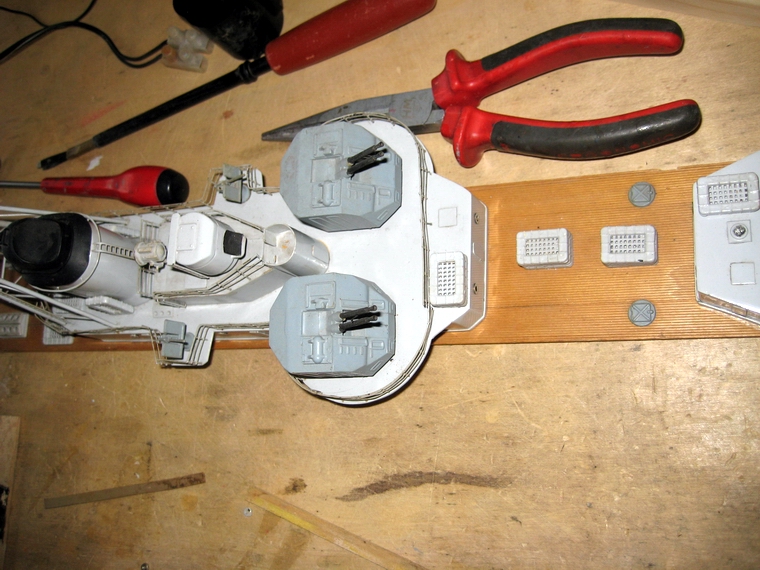
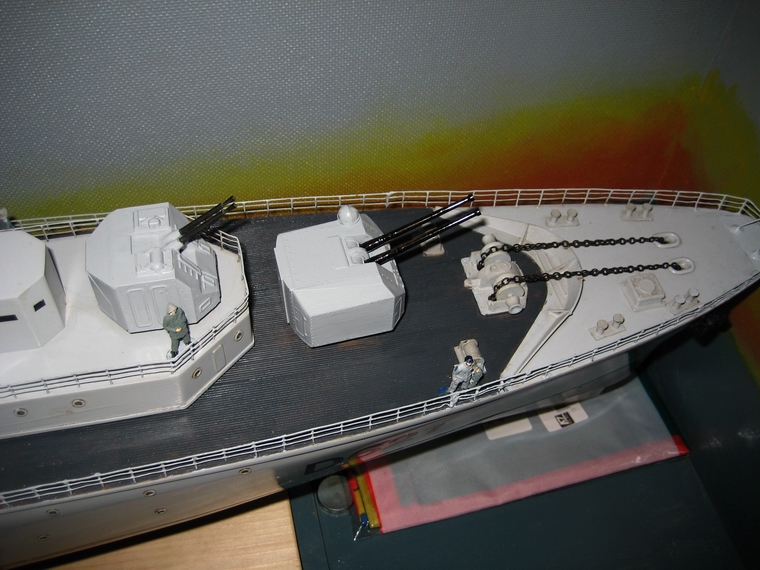
Aufbau vorne |
Aufbau Mitte |
Aufbau Mitte |
die Situation beio den Motoren hinten |
 |
 |
 |
 |
|
|
|
geklebter Riss, beidseits |
|
Die Aufarbeitung des Zerstörers beginnt
Rumpfarbeiten
- Behebung der Risse und Beschädigungen am Rumpf
Vor allen anderen Dingen wurde der
Bleikügelchen-Ballast bereits fixiert.
Anschließend wurde jeder
Riss nach
dem Abheben der Rumpfwand oben beim Deck, mit dickem
Sekundenkleber wieder ge-
klebt. Auf der Innenseite
zeigte sich eine ehemalige Klebung mit einem harzarigem (?), aber nicht
mehr überall haftenden Material. Daher wurde der
gesamte Bereich mit Sekundenkleber nachgeklebt
und
vergossen. Anschließend wurden zusätzlich beidseits im Rissbereich in Höhe des Decks
und der
erreichbaren Rumpfinnenwand, Glasfasermattenstreifen
mit Epoxyharz aufgebracht.
Weiters wurde der ganze Rumpfbereich im
Motorraum mit Harz überstrichen, sodass man erwarten
kann, dass dort alles dicht und fest ist. So war es dann auch, wie es der erste Schwimmtest zeigte.
Die
ehemaligen Kleberwülste an den Risstellen am Rumpf außen wurden beidseitig mit einem Fräser
nivelliert und danach gekittet. Nach dem Schleifen
musste mehrfach noch ein Feinschliff erfolgen, der
aber erst nach
Fertigstellung der Einbauten und
Sonderfunktionen etc. abgeschlossen wurde.
Arbeiten zur
Reparatur der Reling im Bug- und Heckbereich - eine sehr
mühsame Arbeit
Die provisorisch vom
Verkäufer mit einem schmalem Abdeckband am Bug und Heck
befestigte Re-
ling wurde weitetsmöglich ausgerichtet und
die Steher so weit möglich in der früheren Position mit
Sekundenkleber
angeklebt. Sehr mühsam war der anfängliche Klebeversuch
des Handlaufs und der
Querstreben mit Sekundenkleber.
Das war wegen der großen Klebestellen nur mit sehr unbefriedigen-
dem Ergebnis
möglich. Da die Verbindungspunkte sehr klein sein sollten,
musste ich es mit dem Löten
versuchen. Im
Originalzustand ist die Reling auch fein gelötet,
doch das schaffe ich altersbedingt heute
leider
nicht mehr.
Im Bugbereich gelang die Klebeaktion
anfangs halbwergs brauchbar, da dort die Zerstörungen
nicht
so stark waren. Doch zuletzt musste alles
abgefräst und doch auch
mühsam vergelötet werden. Im
Heckbereich
wurde die Instandsetzung der Reling zur Machbarkeits-und
Geduldprobe. Die anfängli-
chen Klebestellen hielten bei den Versuchen, die
diversen Steher und Streben auszurichten, nicht. Also
mussten auch hier die massig vielen
Schadstellen neu gelötet werden. Zu große Lötpatzen
mussten ab-
gefeilt werden. Das Feilen war eine
Mühsame Arbeit, denn das Geländer ist weich wie Butter, wenn
man es bearbeitet, und meine Fingespitzen sind zu dick, um
es ordentlich festhalten zu können. Und die
Steher, die waren auch ein Problem, weil die meisten
nicht wirklich im Deck in einer Bohrung steckten.
Daher war notwendig, sehr viele Steher neu aus Messingdraht
0,8mm anzufertigen und gleich zu verzin-
nen. Für
die Steher wurden 1mm Löcher gebohrt, damit sie tiefer
im Deck eingesteckt und angeklebt
werden können. Unschön sind die Sekundenkleberrundungen
am Deck um die Steher herum, aber eine
andere feste
Lösung fiel mir nicht
ein / gelang mir nicht. Wegfeilen funktionierte auch nicht, da zu wenig
Platz für die Feile zwischen Relingstehern und
dem Deck vorhanden
ist. Zuletzt musste das nachgelötete
Geländer noch
ausgerichtet werden, weil es durch das Arbeiten an den Streben und
dem Handlauf nicht
gerade und/oder nicht parallel zu
einander verliefen. Um sie gerade zu biegen musste ich dafür
eine
spezielle schmale Flachzange besorgen und
diese zurechtschleifen, damit sie verwendbar ist.
Summasummarum kann die
Ausbesserung nicht annähernd an den schönen Originalzustand der
Reling
herankommen. Es bleibt zu hoffen, dass
durch das Schiffsdeck mit den Aufbauten und dem grauen
An-
strich der Reling, die Fehler optisch zum
Großteil kaschiert werden können.
Der Antrieb
des Schiffes wird überarbeitet
Ein
erster Test der
Beweglichkeit der Propellerwellen ergab, dass die schon
anfangs beim händischen
Drehen auffällige bockige Welle noch immer durch das
vom Vorbesitzer eingebrachte verhärtete Wellen-
fett gebremst wird. Durch Reinigung
und Zugabe von Öl und nach
einigen Minuten Laufzeit besserte sich
vorübergehend
die Sache. Die Drehzahlen von 8300 und 8200
U/MIn im Leerlauf bei 8,7V Spannung
sind fast gleich,
was zeigt, dass die Motore und Wellen in Ordnung sind und
kein Motortausch erforderlich
ist. Daher
kann der Antrieb unverändert bleiben und das Schiff mit 2S-Lipo Akkus
angetriebent werden.
Die beiden Monoperm Spezial Motore
(Hammerschlaglackierung) sind etwas leistungsfähiger als die
Monoperm Super
(oranges Gehäuse) der Liberty und
sie werden das schlanke Schiff wohl ausreichend
schnell antreiben. Obwohl das Original 63km/h schnell fahren konnte,
wird das Modell mit den Motoren
aus den Jahren um 1980,
wohl auch schnell genug fahren können.
Der
Einbau der Fernsteuerung und der Sonderfunktionen
Das Schiff wird mit einer Modster XC6
2,4Ghz Fernsteuerung (Schweighofer=Flysky) gesteuert. Die
Fahrfunktionen sind erforderlich, sowie für die Steuerung der unteren Geschütztürme,
wofür ein weiterer
Kanal mit dem Drehgeber (DGB)
benötigt wird.
Zur Verlangsamung der Turm Drehgeschwindigkeit
wurde
eine Elektronik (Delay Modul Simprop) in die
Servoleitung eingebaut. Die Einschaltung der Ge-
triebemotore
der zwei Radarantenne und der Positionslampen (rot/grün)
erfolgt durch einen
Dreistel-
lungsschalter (SWC).
Zu den Besonderheiten der sehr
preisgünstigen Steuerung gehört, dass sie Telemetrie
kann.
Automa-
tisch wird die Empfänger- und
Senderspannung ins Display eingespielt. Mit einem
Telemetrie Sensor
kann
die Spannung eines Lipos am Balancerstecker
abgenommen und im Display dargestellt werden.
An den
Spannungssensor wird zusätzlich ein Temperatursensor angesteckt, der die
Temparatur an
einem Motorgehäuse misst und übermittelt. Die Werte muss man allerdings am
Display ablesen, denn
eine Sprachausgabe gibt es nicht (um diesen niedrigen Preis). Die
Temperaturanzeige ermöglicht es
abzuschätzen, ob die
Motore überfordert und heiß werden. Die Spannungsanzeige
schützt vor Unter-
ladung und Schädigung der Akkus.
Der
Modster Sender wurde mit 4 NiMh-Akku-Zellen bestückt und
kann über die nachgerüstete Lade-
buchse mit dem
Kabel für Exmitter- und Flyskysender aufgeladen werden.
Der Sender bleibt künftig in
der Box beim
Schiff und wird für kein anderes Modell verwendet.
Um die divrsen Einbauten im Rumpf wieder zu montieren,
wurden sie nachgearbeitet und verbessert.
So wurden am Servobrett für das Ruderservo Ausnehmungen
ausgefräst, die eine Ölung der Wellen-
lager ermöglichen. Die ehemals über den Motoren montierten Sperrholzbrettchen ohne erkennbarer
Funktion wurden nicht mehr eingebaut. Da
das Ruder etwa 45 Grad in jeder Richtung ausschlagen
soll,
musste die Schubstange dementsprechend weiter innen am
Ruderarm eingehängt werden.
Die
vorhandene Anlenkung des hinteren Geschützturms am Deck brachte
mich auf die Idee, den Turm
als Sonderfunktion beweglich
zu machen. Um eine Funktion der
Drehung zu erreichen, musste ein Ser-
vo mit einem verlängerten
Ruderarm bestückt werden, damit ein ansehnlicher
Drehwinkel der Turmes
erreicht werden kann. Beim
Nachschauen ob der vordere Turm angelenkt
werden könnte, wurde eine
Scheibe auf der Turm Drehachse
entdeckt. Mit einem auf
diese Scheibe aufgeschraubten Hebelarm,
kann auch dieser Turm
gleichzeitig, aber etwas eingeschränkt, bewegt werden.
Der Einbau eines ersten Getriebemotors für die
hintere Radarantenne 2 erfolgte direkt im hinteren Auf-
bau, der aus
Kunststoff hergestellt ist. Dazu musste das
Loch des Antennenantriebes vergrößert werden,
damit die
Wellenkupplung ausreichend Platz hat und
nirgends streift und Störgeräusche verursacht. Der
Getriebemotor ist leider unüberhörbar laut, doch
kann keine Dämpfung untergebracht werden.
Um
die Beleuchtung der Positionslampen und den Getriebemotor mit Strom
versorgen zu können, wur-
den die auch bei meinen anderen Schiffen bewährten Berylliumblech Kontakte
eingebaut. Beim Aufset-
zen der Aufbauten
werden die Schleifkontakte aktiv und leiten den vom
Schaltservo kommenden Strom
zu den Verbrauchern in den Aufbauten weiter.
Auf zum
ersten Schwimmtest
Bevor der Platz für das
Schaltservo, den Regler, den Empfänger und die Akkus
fixiert werden konnte,
musste ein Schwimmtest
durchgeführt werden. Dabei wird auf die Einhaltung der
Wasserlinie geachtet
und die einzubauenden Teile
provisorisch positioniert. Daher ging es mit dem
halbfertigen Boot zum
Waldteich nach Würnitz. Schon
das Zuwasserbringen war wegen der Schiffslänge und Aufbauten ein
wenig komplizierter als bei den
anderen Schiffsmodellen. Aus diesem Grund wurde ein
den Rücken
schonender "Slipwagen" gebaut, mit dem
das Wassern vom Steg des Teiches aus, besser
funktioniert.
Im Wasser mit aufgesetzten
Aufbauten, das Schiff losgelassen,
bekommt es merklich Schlagseite.
Das war klar,
weil das lose liegende Akkupack im Bugbereich seitlich verrutscht
war. Mit dem etwas zu-
rechtgerücktem Akkupaar
und noch 120g Blei daneben, konnte die Schieflage
weitgehend normalisiert
werden. Allerdings war klar
zu sehen, dass das Heck von der Wasserlinie weg
ziemlich hoch lag, der
Bug lag aber knapp
unter der Wasserlinie.
Mit provisorisch am Deck platzierten
Bleiplatten wurde die
Schwimmlage verbessert. Schließlich wurde
ein
vorsichtiger Fahrversuch gewagt. Der
Auslauf begann mit
langsamer Fahrt durch einen Algenhaufen -
und schon stand
die Partie. Die Meinung die Kunststoff Propeller würden die
Algen zerstrückeln, war ein
Irrtum. Auch mit voll Retour
bewegte sich das Modell kaum noch. Da es in noch
in Reichweite der Hände
mit einem Ästchen war,
konnte es zurückgezogen, die Algen bei den Propellern
entfernt und das Schiff
neuerlich auslaufen
gelassen werden.
Vorsichtig
beschleunigte ich und begann einen weite Kurve zu
fahren, um zu sehen welche Schräglage
das Modell
einnimmt. Dann gab ich kurz volle Kraft voraus und das Schiff
beschleunigte. MIt Akkus mit
nur 60% Kapazität
konnte eine zum Schiffstyp passende Geschwindigkeit
leicht erreicht werden. Dann
wurden die Kurvenradien mit halber
Fahrt und enger gefahren, und siehe da, das Schiff krängte
erheb-
lich aus; - für mich angsterregend
stark. Danach erfolgte
bereits die Retourfaht. - Wie beim Fahrgastschiff
Liberty sprudeln
auch hier die Propeller und das Modell fährt
bei Retourfahrt, wenn überhaupt,
nur irgend-
wohin. Und falls das Ruder
endlich zu wirken beginnt, dauert
es lange und das Ergebnis ist unzureichend.
Hier muss später eine Vergrößerung der Ruderfläche
erfolgen, auch wenn es nicht zum Maßstab passt.
Beim Schwimmtest
sah man, dass das Modell mindestens 1cm zu wenig
Tiefgang hatte, um die Was-
serlinie zu erreichen. Die beim Fahrtest stehenden
Akkus müssen künftig flach am Boden
aufgelegt
werden. Außerdem wurden zusätzlich 650g Bleiplatten
am Schiffsboden aufgebracht und die Akkus
mitt-
schiffs untergebracht. Vor allem mittschiffs und
im Heckbereich wurden die Walzbleiplatten mit PVH-
Leim
"angeheftet". Nachdem der Akkuplatz festgelegt war, konnte auch
der New Rain Regler befestigt
werden. Der Empfänger
rutschte nach vorn zum Bug, zum Turmdrehservo. Bei der nächsten
Schwimm-
probe wird sich zeigen, wie das Schiff im Wasser liegt und ob noch mehr Bleiplatten
einzubringen sind
oder eine andere Verteilung
notwendig ist.
Die
Restauration und Fertigstellung schreitet weiter
Lackierarbeiten
Für
mich ist die Lackierung immer ein schwieriges Kapitel.
Gerne würde ich mir eine komplette Lackie-
rung des
ausgebesserten Rumpfes ersparen, denn das würde eine
Halterung für den Rumpf bei der
Lackierarbeit erfordern, die erst gebaut werden
müsste. Jedoch das Hauptproblem ist der richtige Lack
und Farbton, der zum gealterten Lack passen
müsste. Die farbliche Übereinstimmung zu erreichen
ist
aber fast unmöglich. Um die richtige Farbe zu bekommen,
nahm ich von den Aufbauten einen Teil mit
und im Geschäft wurde die Farbe gescannt und dann speziell
angemischt. Der Farbton stellte sich dann
als zu hell heraus und ich hätte auch keinen seidenmatten
Lack nehmen dürfen, wie sich nach einem
Probeanstrich herausstellte. Mein Versuch durch Zumischung von schwarzem Lack den richtigen Farb-
ton
anzumischen, war nicht erfolgreich. Der Lack war dann einen
Deut zu dunkel und damit für den Zweck
unbrauchbar geworden.
Neuerlich musste Lack beschafft werden, diesmal glänzend. Eine neue
Farbbestimmung mittels Farb-
karte und eine neue Mischung des grauen Rumpflacks mit glänzendem
Lack, verlief erfolgreich. Aus
einem Farbtest wurde
gleich eine Ausbesserung der Riss-Schadstellen, die
erstaunlich gut glückte. Da-
her musste der Rumpf nicht
gespritzt werden und kann so bleiben wie er
ist. - Auch bei der dunkelroten
Farbe des Unterwasserschiffs machte ich den Test
mit einer vorhandenen dunkelroten Farbe, die zwar
glänzend ist und dünkler. Nun konnte auch der
untere Rumpfbereich gestrichen werden.
Nach mehrfacher
Streichung der ausgebesserten
weiß schimmernden Schadstellen deckte endlich die
rote Farbe, so-
dass der Unterrumpf
seinen Endanstrich erhalten konnte. Zuletzt wurde einen
neue Wasserlinie mit dem
3mm Zierband
(Autozubehör) auf der gleich Position wie zuvor aufgeklebt.
Nachdem
ich mir lange den Kopf zerbrochen hatte, ob der Surcouf ein
Holzdeck hatte, wandte ich mich
mit der Frage an mein
deutsches Internetforum. Die fachliche Auskunft ergab,
dass das Deck (natürlich)
dunkelfarbig war.
Auch die dunkelgrauen Geschütztürme wären an meinem
Modell farblich nicht richtig,
denn auch die waren in der Farbe der Aufbauten
gehalten, die Kanonenrohre waren schwarz. Und so
habe ich
schließlich dem Schiff ein neues und dem Vorbild
besser entsprechendes Aussehen verpasst.
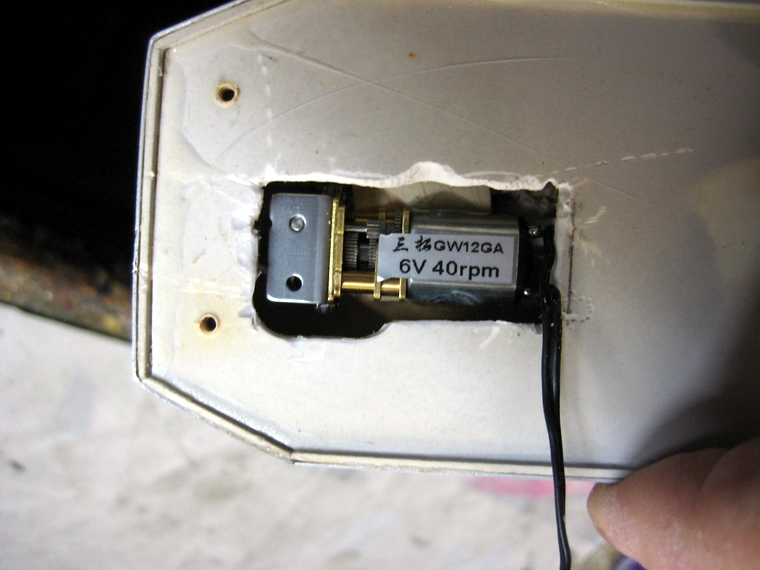
Die Radarantenne
2 wird drehbar gemacht
Der
hintere Deckaufbau wurde wie vorgesehen für den Einbau des kleinen Winkel-Getriebemotors
(GW12GA, 6V, 40U/Min) für die hintere Radarantenne auf der Unterseite aufgeschnitten. Der kleine
Motor hat im Aufbau unter dem Dach Platz und
überragt die Aufbautenplatte nicht nach unten. Auf die
3mm Antriebsachse wurde ein 4mm Messingrohr aufgesteckt
und auf der angeschrägten Stelle der
Achse
zusammengequetscht, sodaß das Rohrstück künftig mitgenommen wird. In die Mitnehmerhülse
wurden zwei kurze Rohstücke
eingeklebt, wobei die Antennenachse in die
dünne Bohrung eingesteckt
wurde. Sie wird nicht geklebt
sondern mit Lack gesichert, damit man sie notfalls
herausziehen kann.
Der Motor wurde mit
Sekundenkleber
innen auf der Unterseite des Gehäusedachs angeklebt. Diese
Klebung ist leider
für die Lärmerzeugung zuständig, da der
Deckaufbau wie eine Lautsprechermem-
brane wirkt.
Radarantenne
1, die Große, wird drehbar gemacht
Zu einem
späteren Zeitpunkt wurde die große Rardarantenne 1 am
vorderen Mast ebenfalls mit einem
Getriebemotor
bestückt. Diese Antenne rotiert langsamer, da sie einen
12V Motor hat, der nur mit ~ 4V
gespeist wird.
Beide Antennen laufen gleichzeitig. - Zum EInbau
des Getriebemotors musste der vor-
dere Aufbau
zerlegt werden, um den Motor sinngemäß zum anderen
Antennenmotor einbauen zu können.
Der nachträgliche
Einbau des Getriebemotors konnte nur nach Abschneiden der vorhandenen
Antennen
vorgenommen werden, was danach erst
das Hantieren mit dem vorderen Teil des Aufbaus ermöglichte.
Nachdem
der Motor eingeklebt und mit der Antenne verbunden war,
ergab sich das Lärmproblem wie
bei der
hinteren Antenne. Diesmal wurde der Motor mit
Servo-Doppelklebeband angeklebt. Zusätzlich
wurde
ein Hartschaumstoffstück zwischen Motor und Aufbau
eingeklemmt und so die Lärmerzeugung
wesentlich
gedämpft.
Die nächste
Aufgabe war, die Herstellung der Stromversorgung für Radarantennenmotore und die zwei
Positions-LEDs.
Die bewährte Methode mit Berylliumblech-Kontakten am
Aufbau und Rumpf gewähr-
leistet die Versorgung der Verbraucher
ohne Kabelverbindung.
Zur Schaltung der Antenne wurde im
Rumpf wurde ein altes Servo mit einem Mikroschalter
untergebracht. Die Stromversorgung erfolgt
durch eine LiIon-Zelle mit 3,6V in einem Batteriefach,
mit der die LED-Dioden und die Antennenmotore
versorgt
werden.
Mit dem Sender Kippschalter (SWC, 3-Stellungen) am Sender können
die Antenne und die Positions-
lampen ein- und
ausgeschaltet werden.
Hinweis: Die für
die Zusatzverbraucher erforderliche LiIon-Zelle muss
immer polrichtig (rote Markie-
rung +) eingelegt
werden und ist darauf zu achten, dass sich die
Zellenkontakte unten befinden. Wenn
die roten Markierungen
an Zelle und Batteriekasten fluchten, dann passt es. Zur
allfälligen Ladung im
Modell kann die MPX-Ladebuchse
verwendet werden.
Rettungsboote und Funkantennen
Von den Rettungsbooten fehlten laut dem
Schiffsplan 3 Stück. Eine große Motorbarkasse und zwei
kleinere Ruderboote. Die Halterungen für die Boote
waren teilweise vorhanden aber defekt, sodass
eine Reparatur und
ein Nachbau erforderlich war. Die zwei kleinen
Ruderboote und die Barkasse wurden
zugekauft. Für die Barkasse wurde ein größeres Ruderboot
beschafft, welches mit einem Deck und mit
einer Kabine
versehen wurde. Nach Fertigstellung der
einzelnen Bootshalterungen konnten sie samt den
schon lackierten Booten am Deck angeklebt
werden.
Schließlich nahm ich mir Schwung und
begann die Schiffs-Funktantennen
nachzurüsten. Mit einem 0,5mm
Stahldraht ließ sich
das gut realisieren.
Besatzung
Um dem Schiff "Leben einzuhauchen" wurde eine Besatzung
(Revell) beschafft, bemalt und in logischen
Teams beim
Üben etc. an Deck aufgeklebt. Die Figuren sind nur mit
einem Doppelklebeband angeklebt
und können
leicht wieder entfernt werden. In einer Schachtel in der
Aufbewahrungsbox sind noch etwa 15
Kadetten in
Ausgehuniform und ein Offizier vorhanden, die im
Bedarfsfall am Vorderdeck aufgestellt wer-
den könnten. Einige Bilder über die Anordnung der
Marinefiguren folgen unten.
|
|
|
|
|
|
|
|
 |
 |
 |
|
Rumpfriss beidseitig |
Riss repariert und gekittet |
ausgebesserter Riss - Farbton passt |
Untersicht des ausgebesserten Rumpfes |
 |
 |
 |
 |
|
kleiner Seitenriss |
Ausbesserung OK |
Riss der Wellenhalterung am Stevenrohr |
Wellenhalter wieder fest |
|
|
 |
 |
 |
|
desolate Ausgangssituation |
erster Lötversuch |
nach dem
Versuch mit Lötung |
gelötet ist schon
schöner |
 |
 |
 |
 |
|
Turmdrehservo
Turm-Dreh- Video |
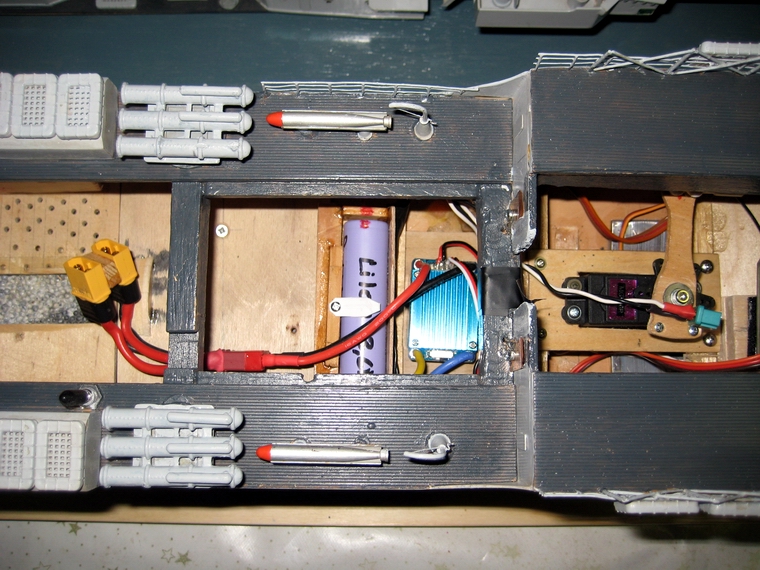
Ansoicht Motorraum neu |
Akkuplatz und Regler |
Empfänger und Turm-Drehservo |
|
|
 |
|
 |
|
gelöteter 0,6mm Darht |
Reling
bescheiden repariert |
|
das Heck mit Propellern Graupner 40 Dm |
|
|
 |
 |
 |
|
erster Schwimm- und Fahrtest |
verstaut für die Heimfahrt |
der
Slipwagen
ist einsatzbereit |
halbfertige Transportbox |
 |
 |
 |
 |
|
Mitnehmer für Antennenantrieb |
Winkel-Getriebemotor (Type GW12GA) |
Ansicht Antenne |
Rettungsboote nachgerüstet |
 |
 |
 |
 |
|
überarbeitete Reling mit Flaggenmast |
Reling und Flagge am Bug |
Ansicht Antennen |
Deck Heckansicht noch Originalzustand |
 |
 |
 |
 |
|
Draufsicht auf die Rettungsboote |
geschütze vorbildentsprechend lackiert |
Deck mit verdünntem Acryllack (anthrazit), einmal
gestrichen |
Deck dreimal gestrichen |
 |
|
 |
 |
|
Schiff fast fertig |
neue Messing Prop 40 Dm |
|
|
 |
 |
 |
 |
|
Ansicht Batteriekammer Licht, R-Antenne |
Radarantenne |
Blick auf die Funkantennen |
ngriff
|
Der
Badewannen-Schwimmtest mit dem fast fertigen Schiff
Nun fehlte für den definitiven Abschluss der Bauarbeiten
der dringen notwendige Schwimmtest zum
endgültigen
Auswiegen
des Schiffes. Den konnte ich
in der Badewanne durchführen, die beinahe zu
klein
geworden ist. Nachdem das Schiff im Wasser lag,
sah man, dass das Schiff mit Glück nahezu
in der
richtigen Lage schwimmt. Allerdings ergaben die Kontrollfotos,
dass der Bug zwei Millimeter
tiefer als die Wasserlinie lag. Nach dem Test entfernte ich im Bugbereich
daher 125g Blei. Dafür
zeigte das Heckfoto, dass die Wasserlinie 2 Millimeter
über dem Wasserspiegel lag. Hier wurden
vorerst 65g Blei
am hintersten Schiffboden eingeklebt. Sollte hier noch was fehlen, kann
dort oder da
einfach noch eine Bleiplatte eingeklebt werden. Die LiIon Zelle befindet sich
jetzt neben dem
blauen
Regler.
Danach
krängte ich den Rumpf im Wasser seitlich um etwa 15 Grad aus und ließ
ihn zurückschwingen.
Die Krängung verlor sich
aber rasch, sodass ich keine Sorge haben muss, wenn der
Zerstörer einmal
eine engere Kurve fahren sollte. Es
wurde auch die Ruderwirkung getestet, die jedoch mit
halbem Aus-
schlag und halber Motorenleistung nicht so stark
war, dass das Schiff hätte gegen die Strömung in der
Wanne gesteuert werden können. Obwohl die Größe des Seitenruders bei
der ersten Testfahrt als aus-
reichend erschienen ist,
sieht man von der Unwirksamkeit bei
Retourfahrt ab, habe ich dennoch das
Ruder vergrößert.
Besonders der
erhebliche Spalt zwischen Rumpf und Ruderblatt wurde
minimiert und
das Ruder nach vorne hin verlängert, sodass es
bei bei vollem Ausschlag in die Nähe der Schiffschrau-
ben kommt und einen Teil der Strömung
ablenken kann, der das Schiff bewegt. Das Schiff lenkt künftig
hoffentlich auch bei
Retourfahrt.
Der Schwimmtest diente auch als Dichtheitsprobe, vielmehr jedoch zur
Feststellung, wie stark die
Messingpropeller
die Motore belasten. Ein anfänglicher Test mit voller
Kraft wurde zur Strommessung
verwendet, wobei sich
ergab, dass ein Motor auf max. 3A kommt, also die
vorgesehene maximal
zulässige Belastung des Motors nicht überschritten wird. Nun, so
schnell kann man das Schiff vermut-
lich ohnedies nicht
ständig fahren.
Danach liefen die Motore
etwa 5 Minuten mit halber Last und sie wurden dabei
höchstens lauwarm. Es
ist jedoch anzunehmen, dass
mit voller Kraft eine merkliche Erwärmung eintreten
wird. Doch wie lange
werde ich den Zerstörer
platzbedingt wohl schon mit voller Kraft fahren lassen können? Ich denke das
würde
besonders bei Kurvenfahrten spektakulär aussehen,
wenn er sich stark nach außen neigt. Die
Erfahrung bei der nächsten längeren Probefahrt wird
zeigen, welche der getroffenen Maßnahmen
sinnvoll
waren und welche verzichtbar sind.
Weitere
Detailarbeiten folgen
Fertigbau
Antennenantrieb 1 und Anschluss der Positionslampen
Während den Arbeiten
an der vorderen Radarantenne kam es zum
Desaster, als der ganze vordere
Aufbau auf den Boden fiel und
viele Details beschädigt wurden. Das
erleicherte zwar momentan die
Arbeiten am
Einbau des Antennenantriebes am vorderen Mast, doch mussten viele Teile zurechtgebo-
gen
oder neu angefertigt und
wieder angelötet oder angeklebt werden. Der neue Antennenmotor
wurde
an die bestehende Stromversorgung angeschlossen. Ein
Probebetireb zeigte schließlich, dass die
Funktion beider
Antennen und der Positionslampen in Ordnung sind.
Nach der
Reparatur der beschädigungen am Aufbau und der
Fertigstellung des Antennenantriebes
konnten alle Teile
gestrichen werden, damit die gute Optik wieder hergestellt
ist.
Vorbereitung
für die erste Testfahrt - Telemetrie Sensoren für Spannungsanzeige und Motortemperatur
Als Abschluss der Arbeiten zur
Restaurierung des Schiffes wurden Sensoren für Spannungsanzeige
und Motortemperatur eines Motors, eingebaut. Die Sensoren
sind unglaublich preisgünstig und der
Sender ist
in der Lage, die gemessene Spannung und Temperatur
anzuzeigen. Eine Sprachausgabe
gibt es nicht, sodass
man immer wieder einen Blick auf die Anzeige machen
muss. Für mich genügt
diese Anzeige zur Entscheidung,
ob das Schiff noch weiter betrieben werden kann oder
nicht.
Für mich faszinierend einfach aber trotzdem
perfekt, ist die Modster- / Flysky-Technik mit ihrer
Tele-
metrie. Der Spannungssensor hat zwei einzelne Stecker so wie sie in den Servosteckern sind, die in
den
Plus-bzw Minuspol eines Balancersteckers
eines Akkus eingesteckt werden. Und damit ist die
Sache
erledigt. Soll ein weiterer Sensor verwendet
werden, kann er an dem ersten Sensor angesteckt
werden.
Meine 6 K Anlage kann drei Sensoren
anzeigen. Mein zweiter Sensor dient der
Temperatur-
messung an einem Motor. Der Sensor ist
ein kleiner elektronischer Bauteil, den ich mit einem
Klebe-
band auf dem Motorgehäuse angeklebt habe. Um
die Sensoren anzeigen zu lassen, muss nur wenig
"programmiert" werden. Die Sensoren müssen
am Sender im Rx (Empfänger)
eingestellt werden.
Welcher Sensor es sein soll muss im
zweiten Programmteil eingestellt werden. - Ich
bin sehr froh,
dass diese Steuerung von mir
programmiert werden konnte, weil es so einfach zu
machen war. Es
wundert mich daher nicht, dass
diese Anlage sehr gute Bewertung in den Internetforen aufweist.
Ein Leerlauftest im Trockenen zeigte, dass im Display nicht nur die
Standard Balkenanzeige für Sen-
der- und Empfängerspannung
funktioniert, sondern auch die Anzeige der Akkuspannung
und die
Temperaturanzeige im Display angezeigt wird. Bei
einem Testlauf mit etwa halber Motordrehzahl stieg
die
angezeigte Motor-Gehäusetemperatur auf 27
Grad an. Am Motordatenschild sind 90 Grad als
Maximalwert angegeben.
Motorraum
Lüftereinbau und Sensortest
Im Fahrbetrieb wird sich
die Temperatur Im Rumpf ohne Lüftungsöffnungen erhöhen, weshalb ich einen
kleinen
PC-Lüfter einbaute, den ich oberhalb der Motore
anordnete und der eine leichte Luftbewegung
im Motorbereich erzeugt. Der Lüfter wird schaltbar
an die Stromversorgung der Motore angeschlossen.
Sollte sich im Fahrbetrieb zeigen, dass die Motortemperatur
nicht über 70 Grad ansteigt, kann er manuell
ausgeschaltet bleiben. Der kleine 12V-Lüfter wird
bei Vollastfahrt mit ca. 8V spannungsabhängig mit der
höchstmöglichen Drehzahl laufen, bei ganz langsamer Fahrt bei
etwa 5V bleibt der Lüfter stehen. Bei
Rückwärtsfahrt arbeitet der Lüfter nicht. Sollte
die Lufterleistung als etwas zu niedrig erweisen, könnte
der Lüfter direkt an der Akkuspannung angeschlossen
werden, also immer laufen, solange Akkus ange-
schlossen
sind.
Das Schiff wurde
mit aufgesetzten Aufbauten einem Temperatur
Sensortest mit halber Leerlaufdrehzahl
bei
Rückwärtsfahrt und daher stehendem Lüfter, unterzogen.
Nach 5 Minuten Laufdauer wurde die Erwär-
mung
des Motors von 23,3 Grad auf 28,7 Grad gemessen.
Anschließend wurde 3 Minuten lang auf volle
Drehzahl
gestellt, wobei die Temperatur auf fast 31,5 Grad
anstieg.
Gleich danach wurden die Motore 3
Minuten lang mit voller Drehzahl in Vorwärtsrichtung,
also mit laufen-
dem Lüfter, laufen gelassen.
Die Motortemperatur sank dadurch auf 27,8 Grad ab, was
auf die Wirkung
des Lüfters zurückzuführen
ist. - Spannend wird der Temperaturverlauf bei Faht am Wasser
werden.
Der
erste Fahrversuch des Surcouf
Bei angenehmem Wetter kam ich am Waldteich an. Im Auto
wurden noch die Akkus und der Span-
nungssensor
angesteckt und ein kurzer Probelauf durchgeführt. Alles
OK, und los geht's. Beim Wassern
des Schiffs
achtete ich auf die Seitenneigung, doch die war korrekt.
Dann schaltete ich vorsichtig Vor-
wärtsfahrt ein
und ließ das Schiff hinausfahren auf die
Wasserfläche. Ich beschleunigte bis Halblast un
siehe
da, das Modell lief hervorragend und wegen der
niedrigen Wellendrehzahl leise. Der Rudertest
wurde
vorsichtig durchdeführt und es stellte sich
eine angenehme Steuerbarkeit ein. Mit etwas erhöhter
Fahrt wurde ein enger werdender Kreis
gefahren, der zeigte, dass das Schiff gut im Wasser
liegt und
nur wenig auskrängt. Schließlich
getraute ich mich in zuerst Geradeausfahrt, mit voller
Leistung zu fahren;
alles lief OK. Zwischendurch
traten immerwieder Windböen in Erscheinung, die das
Schiff gering in
Seitenlage brachten.
Das
ermunterte mich, die Fahrgeschwindigkleit zu etrhöhen
und den Kurvenradius enger zu steuern.
Das Schiff
krängte aus, doch verlief alles unkritisch und dem
Vorbildschiff sehr ähnlich. Ein Versuch der
Retourfahrt zeigte, dass sich das Schiff bauchbar
steuern lässt. Da mir vorkam, das Modell könnte
im
Heck noch eineige Gramm Blei
vertragen,daher brachte ich noch etwa 50g im Heck unter.
Die
verwendete Modster (=Flysky) Fernsteuerung erwies sich
ideal, da ich während der Fahrt die Akku-
spannung
von einem Akku und die Gehäusetemperatur eines Motors
angezeigt bekam. Die Temperatiur
hatte am Ende
der Fahrt mit flotten Streckenteilen 53 Grad erreicht.
Die Spannung sank nach einer hal-
ben Stunde Fahrt.von
anfangs 8,3V auf 8,1V.
Zusammengefasst ist
der Surcouf ein schönes und interessantes Modell,
welches sich gut fahren lässt.
Ich habe große
Freude dass meine Reparatur erfolgreich war, das Schiff
schön fährt
und ich somit ein
schönes und interessantes Schiff bekommen
habe.
Nacharbeiten:
Wellen fetten und ....
Nach der Jungfernfahrt wurden die
Schiffschraubenwellen ausgebaut und gereinigt. Danach
wurde Robbe
Wellenfett in die Stevenrohre
gedrückt und auf den Wellen verteilt. Die mit einer
Drehung in die Rohre ge-
schobenen Wellen
wurden zuletzt wieder angeschlossen und Probeläufe
durchgeführt. Es scheint, als ob
das
Laufgeräusch der Wellen leiser geworden ist.
Die
Geräschentwicklung ist ursächlich bei der
Motorbefestigung zu suchen, da die Befestigung der
Motore
mit je zwei kaum erreichbaren Schrauben beeinflusst
werden könnte. Da würde eine Sanierung
einen
größeren Eingriff bedingen.
Da
das Schiff noch immer mit dem Heck einen Deut höher als
die Wasserlinie liegt, wurden inzwischen
weitere ca.100g
Bleiplatten eingebracht.
Wegen der doch schon
alten und heiklen Monoperm Super - Motore wurde die
Kühlung verbessert. An-
stelle des bisher eingebauten
40mm wurde ein 50mm Lüfter eingebaut, der
besseren Luftdurchsatz
ermöglicht.
Es
war überlegt ein Soundmodul einzubauen, welches die
gelegentliche Abspielung einer Zerstöresirene
ermöglichen
sollte. Wegen Platzmangels und zu leiserr Signale
wurde der Plan beendet.
|
|
|
|
|
|
 |
 |
 |
 |
|
Schiff in der Transport-/Lagerox |
beim Schwimmtest |
Wasserlinei Heck |
Wasserlinei Bug |
 |
 |
 |
 |
|
Rudervergrößerung in Arbeit |
Marinesoldaten Revell M 1:72 |
der Mann mit dem Fender |
Offiziere halten Ausschau |
 |
 |
 |
 |
|
Das T%orpedoteam übt |
|
am kleinen Geschütz wird geübt |
beide halten Ausschau |
 |
 |
 |
 |
|
Torpedomannschaft beim Üben |
|
Blick auf die Brücke |
|
 |
 |
 |
 |
|
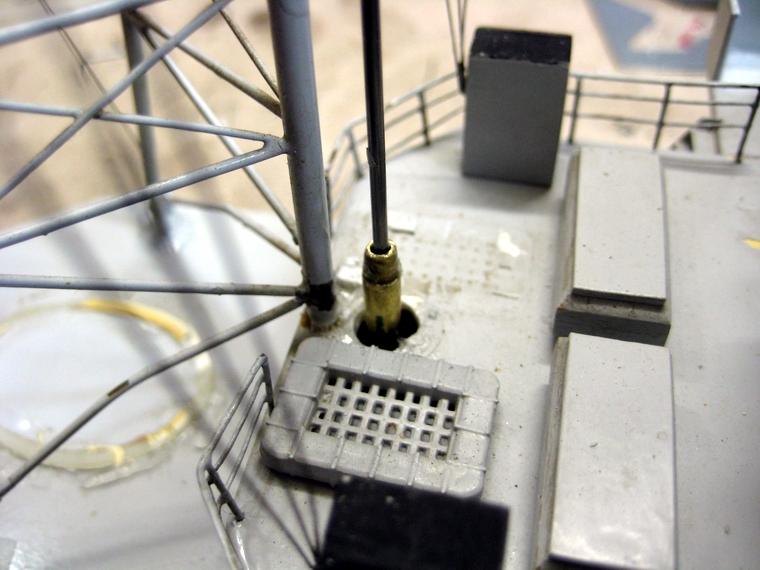
Plan mit den Antennen bei Mast 1 |
fixe Radarantenne wird demontiert |
der beschädigte Mast nach Abstiurz |
unterer anschluss Antennenatrieb |
 |
 |
 |
 |
|
neue obere Antennenlagerung |
Antenne und reparierte Mastteile |
vordere Antenne 1 ist drehbar |
hintere drehbare Antenne 2 |
 |
 |
 |
 |
|
Ansichten der Maste ... |
|
Schiffsbeschau |
Schiff einsatzbereit mit Modster Sender |
 |
 |
 |
 |
|
die Sensorelektroniken und Temperatursensor am Motor |
der Balancerstecker dienst als Anschluss des
Spannungssensors |
die Anzeigen im Display: oben Spannung da´runter die
Motortemperatrur |
als Überhitzungsschutz PC-Lüfter eingebaut |
 |
|
|
|
|
Soundmodul Zerstörer Sirene |
|
|
Fahrvideo |
|
|
|