| |
|
|
|
|
|
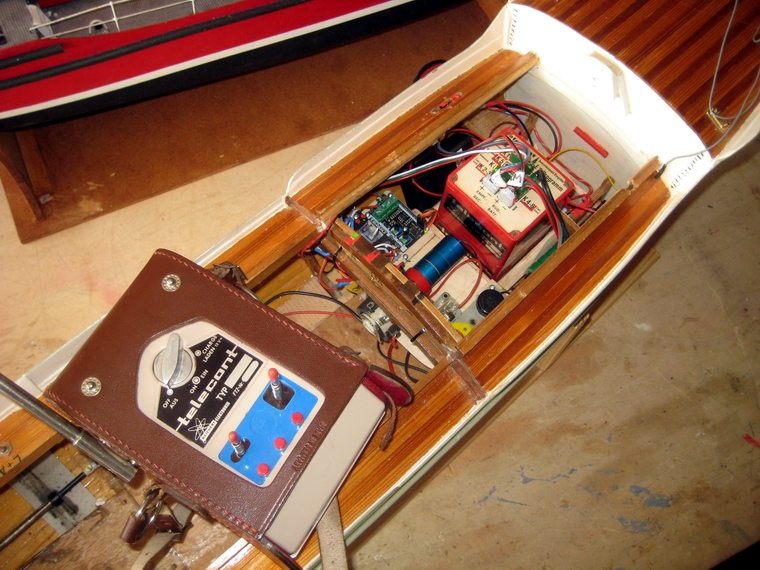
Um
die Funktion und Betriebstauglichkeit einer alten
Telecont Tipp-Fern-
steuerung aus den Jahren ab
1960 zu erproben,
bleibt alleine schon wegen
der Größe des
Empfängers, nur ein Schiffsmodell übrig. Die Anlage wurde
daher in meinem Modellschiff
Liberty eingebaut.
Bei dieser Gelegenheit
wird auch ein Tausch der Monoperm Motore
(orange) vorgenommen, da die eingebauten einen großen Drehzahlunterschied auf-
wiesen, der sich bei der Fahrt auswirkte. Neuere Motore der
gleichen
Bauart
und Leistung wurden eingebaut.
Ein Telecont 9K Empfänger mit Graupner Varioton
Rudermaschinen wird
das Schiff künftg
steuern.
Über die Umrüstung und die späteren Erfahrungen beim
Betrieb der Steue-
rung im Schiff, wird
nachfolgend berichtet.
Technische Daten:
Länge: 1150mm, Breite: 195mm, Fahrgewicht:
6,35kg, Tiefgang ~70mm,
Höhe
über Aufbau: 330mm. Höhe über Mast: 500mm,
Motore
2x Monoperm Super 6V, Propeller: 3-Blatt 40mm Aeronaut,
Akku Antrieb: 2x 2S 2700 Lipo, parallel,
Akkus: Beleuchtung: 1S LiIon 2600mAh,
Akku für Rauchgenerator: NiMh 5Z 2000mAh,
Fernsteuerung:
Sender:
27mHz
Telecont S2 9K
- Tipp-Fernsteuerung,
Empfanganlage:
Telecont Empfänger E2 9K ,
Rudermaschinen:
Fahrtgeschwindigkeit:
Fahrtregler GR Varioton (2 Kanäle),
Umpolschalter:
GR Servoautomatic (2K),
Rudersteuerung: GR Bellamatic
(2K),
Rauchgenerator Eigenbau Servo-Tipp-Elektronik
1K),
Funktionen:
Geschwindigkeit, Fahrtrichtung, Ruder, Raucherzeuger
|

Liberty erstmals unterwegs
Fahrvideo Teich (Telecont)

Liberty im Werfthafen
Fahrvideo Werfthafen
(Telecont)

Liberty bei drittem Test
Fahrvideo Teich
(Telecont) |
Einbau
der 27 mHz Telecont Tipp-Fernsteuerung
Schon immer wollte ich eine
Telecont Fernsteuerung haben, um damit Modelle zu
betreiben. Umso-
mehr freut es mich, dass ich nun
eine reparierte funktionierende Steuerung mit einen neuen HF-Teil
habe, die mit einen neuen Quarz
27,12mHz bestückt wurde. Ich möchte die Steuerung gerne im
Schiff verwenden, um den
Unterschied der Steuertechnik im Gegensatz zu
meinem zwar bruchfreien
Flug mit der Graupner Variophon
S Tipp-Steuerung, feststellen zu können. Der Flug
ist wegen der
mir zu flinken Bellamatic Rudermaschinen
(trotz Rücklaufreglern) und
wegen zu großer
Ruderaus-
schläge am Amateur, in mehr als stressiger in
Erinnerung.
Trotz des massigen Telecont-Empfängers
und den deutlich größeren Rudermaschinen ist die
Telecont Steuerung in diesem Schiff
verwendbar. Erschwerend gegenüber heutigen Steuermöglich-
keiten
ist, dass jede Funktion mechanisch justiert werden muss,
denn Trimmungen via Sender sind,
ausgenommen
durch Verwendung der Graupner Trimmomatic
Rudermaschine
o. Ä., unmöglich.
Und ein wegen Funkstörungen
hilfreiches Fail Safe gibt es auch nicht.
Die Verwendung mechanischer
Fahrtrichtungs- (=Umpolungs-) und Geschwindigkeitsregler bedingt
starke Rudermaschinen, die
mir nicht verfügbar
sind. Meine Robbe
Rudermaschinen sind dafür ent-
weder zu schwach oder haben zu
geringen Ruderweg. - Die allfällige Ertüchtigung solcher
Ruderma-
schinen bedingt schwierige Umbauten an den
Servos, die die Frage nach deren Sinnhaftigkeit
auf-
werfen. Früher waren deratige
Konstruktionen die Folge mangelnder Gelder für geeignete
Ruderma-
schinen, und gemäß dem Spruch: "Not macht
erfinderisch!", üblich. Der Verzicht auf meine
ungeeig-
neten Robbe Rudermaschinen ist mir
daher nicht schwergefallen.
Als
Ersatz boten sich bei mir vorhandene und noch heute
beschaffbare Rudermaschinen von
Graupner
an. Sie bauen klein, sind stark und für ihren
Einsatzzweck bestens geeignet. Dank der
Telecont Technik ist deren Verwendung
problemlos möglich und es bedarf nur der Anfertigung von
Übergamngskabeln,
da die Servos auch mit der Variophon Steuerung
weiterhin verwendbar
bleiben sollen. Für diese
Rudermaschinen ist dien2,4V Stromversorgung
erforderlich.Der Empfänger
wird wie bei
Graupner mit 6V betrieben.
Die Umrüstung beginnt
Im ersten Schritt wurde der Ausbau der bisherigen
Fernsteuer-Einbauten des Schiffs vorgenommen.
Wegen der vorhandenen weniger gut
laufenden Motore wurden neuere des gleichen Typs
eingebaut.
Dabei galt es durch eine neue
Motorbefestigung die Einbaulage zu
optímieren und Antriebslärm zu
vermindern.
Danach
war zu entscheiden, welche Rudermaschinen eingebaut
werden sollen. Nach dem ersten
Versuch der
Unterbringung des 9K-Empfängers im bugseitigen Rumpfraum wurde klar,
dass anstelle
der großen Robbe-Telecont-Rudermaschinen,
solche von Graupner verwendet werden müssen, die
erheblich
kleiner und kräftiger sind.
Bei
der Herstellung der Übergangskabel ergab sich, dass die
dafür notwendigen, schwierig zu be-
schaffenden
Varioton-Stecker-Buchsen, aus meinen defekten
Varioton Schaltstufen zu entnehmen
waren. Die
Telecont Stecker sind ebenfalls Mangelware und mussten
in Eigenanfertigung (Kiefer-
leiste mit Messingdraht
Stiften) hergestellt werden.
Die
Rudermaschinen werden angeordnet und ihre Funktion
geprüft
Zum Einsatz kamen
zuletzt Graupners Bellamatic, eine Servoautomatic mit Umpolsatz
und ein
Graupner Fahrtregler. Die Sonderfunktion Rauch wird
mit einer Tipp-Servo-Elektronik (Eigenbau)
geschaltet.
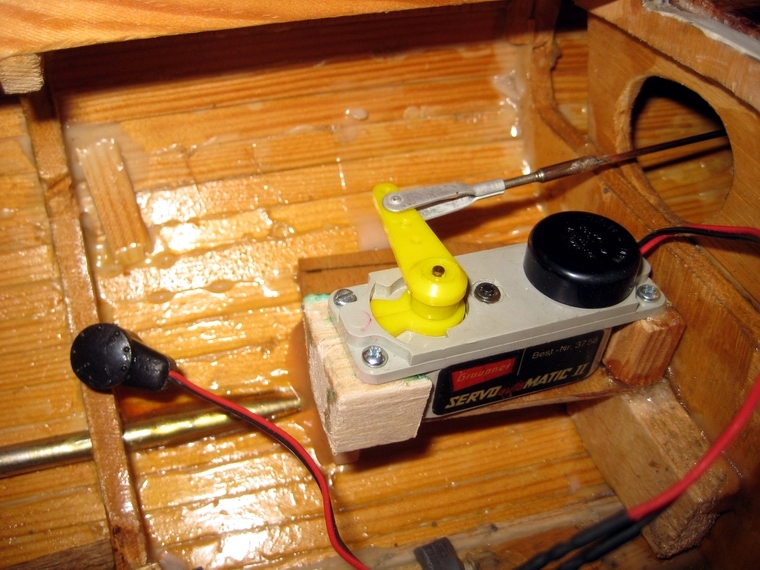
Für das Ruder wurde
anfangs eine nicht neutralisierende Graupner
Servoautomatic Rudermaschine
eingebaut. Sie ist
klein, sehr stark, nicht blitzartig ausschlagend, aber
leider nicht selbstneutralisierend.
Das führte bei
der Rücksteuerung zur Geradeausfahrt immer zu leichten
Schlingerbeweguingen. Zum
Fahren von Kurven
ist dieses Servo angnehm, da man den Ruderknüppel nicht
ständig halten oder
tippen muss. Ist eine Kurve zu eng
gesteuert worden, genügen kurze Tipps, um die Kurve
abzuflachen.
Anlegemanöver wären schwierig gewesen.
Daher wurde anstelle
der Servoautomatic eine selbst neutralisierende
Bellamatic Rudermaschine
eingebaut. Eine weite
Kurve müsste durch kurze Tippbefehle im gewünschten Radius gesteuert
werden. Mehr oder weniger auffällige Ecken beim Fahren der Kurve sind daher
die Folge. Da die
Bellamtic einen langsamen
Rücklauf hat, ist der Kurvenauslauf weich und die
Rudermaschine daher
doch gut geeignet. - Man
muss sich auf das Steuerverhalten einstellen.
Zur Umschaltung
der Fahrtrichtung Vorwärts-, Stopp, - Rückwärts wird
ebenfalls eine Ruderma-
schine Servoautomatic
mit dem Graupner Umpolsatz eingebaut.
Sie hat den großen Vorteil, dass
die Mittelstellung,
also die AUS-Stellung, dafür bauartbedingt einen großen Einstellspielraum
hat, der leicht ansteuerbar ist. Sofortiges Vor-
und Zurückschalten ist als Folge der langsamen
Ruderhebelbewegung nicht möglich, da
die Umsteuerzeit Ende bis Ende etwa 3 Sekunden beträgt.
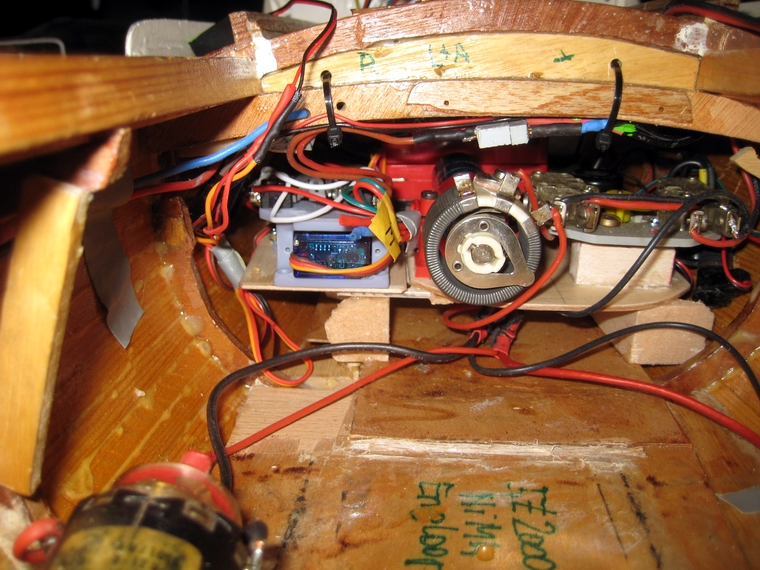
Die
Regelung der Motordrehzahl und damit der Fahrgeschwindigkeit, wird mittels eines Graupner
Fahrtreglers vorgenommen. Die Umschaltdauer
von 0 bis Vollgas beträgt gut 2 Sekunden.
Alle verwendeten
Graupner Rudermaschinen werden mit 2,4V betrieben.
Das Eigenbau Tipp-Servo braucht 6V, und wird
vom Akku für den Raugenerator mitversorgt. Die
Ein -/ Ausschaltung des Rauchgenerators wird mittels Tipp-Impulsen
von einem Taster am Sender
wie bei einer
Einkanal-Rudermaschine, durchgeführt. Der Servoarm
betätigt einen Mikroschalter
der umschaltet.
Reichweitenerprobung
Die Erprobung der Empfangsanlage verlief wie
bei mir sonst auch üblich im Hof und sie fiel positiv
aus.
Mit nicht ausgezogener Senderantenne und der auf den Schiffsmasten
befestigter Empfän-
gerantenne, ist bei
laufenden (entstörten Motoren) im am Bautisch in der
Garage, keine
ausreichen-
de
Reichweite zu erreichen. Aber das ist eigentlich
klar.
Offenbar ist es
hier auch vorteilhaft und wichtig, immer mit voll aufgeladenen Sender- und Empfän-
gerakkus den Fahrbetrieb zu beginnen!
Die
serienmäßig
verwendeten Sender-Akkus haben eine sehr geringe Kapazität
(250mAh), die für
die erforderliche
Sendeleistung ausreicht. Der Sender zieht im
Wesentlichen nur im Moment der
Betätigung
beim Tippen Strom.
Beim Empfänger und den getrennt
versorgten Rudermaschinen wurden früher jeweils kleine
5zellige (DEAC-Blaustrumpf-) Akkus 6V 250mAh verwendet.
Heute verwende ich 5zellige NiMh
Akkus mit 2000mAh
für den Empfänger. Für die Rudermaschinen ist ein 2-Zeller 2,4V-Akku
mit
2000mAh in Verwendung.
Motorumrüstung
Beim Einbau
der "neuen Gebrauchtmotore" mussten deren Befestigungen
neu gebaut werden,
damit die Motore
und Doppel-Kardangelekwellen möglichst
in der Flucht der Schraubenwellen
liegen. Der Probelauf
der bisher eingebauten Motore mit der Fernsteuerung zeigte eine Drehzahl-
differenz von
knapp unter 200U/Min. - Nach dem Einbau der
"jüngeren" Motore und einer
Drehrichtungsumschaltung
verringert sich die Drehzahldifferent auf
akzeptable ~ 50U/Min. Natür-
lich mussten die
Propeller gegenseitig vertauscht werden. Die
Höchstdrehzahl beträgt mit einem
6V
Blei-Akku 5500U/Min; mit den bereits früher
im Schiff
verwendeten 2S Lipo bei 7,8V sind es
bis zu 6600U/Min
Interessant
ist, dass der 20 Ohm Widerstand am Fahrtregler das
Herunterregeln der Drehzahl bis
zum Motor-Stllstand
erlaubt. Das Hochfahren der Motore beginnt jedoch erst
im letzten Drittel des
Steuerweges.
Die bisher oberhalb der Propeller angebrachten
Leitbleche wurden entfernt, da sie keine Wirkung
gezeigt haben
und jetzt das Modell durch die schwere Empfangsanlage
tiefer im Wasser liegt.
Sonderfunktionen
im Aufbau
Im Aufbau sind neben den
Positionslampen auch zahlreiche LEDs eingebaut. Die
Lichter sind 3V-
Lämpchen oder LEDs, die von
einer LiIon Zelle versorgt werden. Sie werden über einen
Schalter,
links am Deck, eingeschaltet.
Gleichzeitig wird damit auch der Radarantennenantrieb
eingeschaltet.
Auf der anderen Seite des
Aufbaus ist ein Dreistellungs Schalter eingebaut, mit
dem nur die Radar-
antenne mit den
Positionslichtern und in der zweiten Stellung die gesamte LED-Deckbeleuchtung
und
Innenbeleuchtung
zugeschaltet werden kann.
Die einzelnen
Verbraucher werden durch der Beryllium
Federkontakte beim Aufsetzen des Auf-
baus mit Strom
versorgt. Ein
gemeinsamer Minuspol, ein Kontakt für das
Rauchelement (R) und
ein Kontakt für die
Beleuchtung und die Radarantenne (L+A) versorgen die
Verbraucher mit Strom.
Die Beleuchtung wird aus einer LiIon-Zelle
gespeist.
Der 6V Rauchgenerator im Schornstein
wird mittels der Tipp-Elektronik mit K1 ein- und ausge-
schaltet. Die
Stromversorgung des Raucheinsatzes und der Eigenbau
Tipp-Servo-Elektronik er-
folgt durch einen
5zelligen NiMh 2000mAh Akku.
Funktionsweise: Beim Einschalten
der Empfangsanlage lauft das
Tipp-Servo in die davor auf der
Elektronik justierte Einschaltstellung, wodurch der
Rauchentwickler zu arbeiten beginnt. Um nicht zu
früh
den Rauch zu aktivieren, muss der Tatser von K1 kurz getastet werden, wobei das Servo in
die Gegenrichtung läuft
und der Raucherzeuger abgeschaltet wird. Mit dem nächsten
Tastimpuls
schaltet das Servo wieder ein.
Zum
allfälligen Nachfüllen befindet sich eine kleine
Menge Dampföl und eine kleine Spritze in einer
Schachtel im Schiff. Ins Rauchelememt werden
mit der Spritze etwa 0,5ml (bis zur Einkerbung)
gefüllt. Die
ohnedies für ein Schiffsmodell schwache Raucherzeugung begrenzt sich auf mehrmals
je
ein bis zwei Minuten, insgesamt max.10 Minuten. Danach ist das
Rauchöl
(von der Modellbahn)
verbraucht. Also nur bei nahen
Vorbeifahrten den Raucherzeuger überlegt aktivieren,
denn sonst
sieht man ihnm kaum, weil die
Rauchmenge zu gering ist.
Gewichtsverteilung
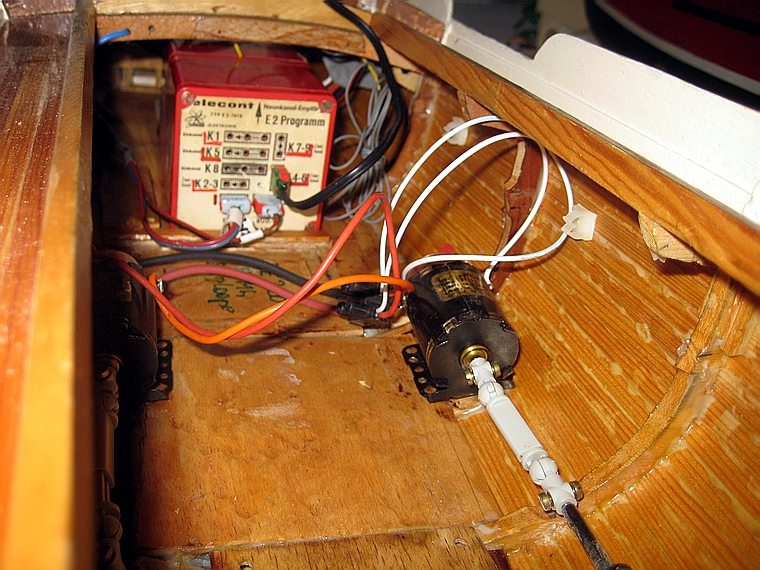
Nachdem
der mächtige Telecont Pendelaudion Empfänger für alle möglichen Störungen anfällig
ist, muss er möglichst weit
von Störungsquellen entfernt eingebaut werden. Er wurde
daher vorne
im Rumpf untergebracht. Das
erleichtert die Führung der Antenne aus dem Rumpf auf
das Deck
hinaus und auf die Mastspitzen, wodurch ein
ausreichender Abstand zu den entstörten
Motoren
entsteht.
Der anfangs vorgesehene 6V
12 Ah Bleiakku war viel zu schwer (1650g). Daher wurde
auf die vor-
herige Stromversorgung
mit 2x2S Lipos parallel zurückgegriffen. Die Akkus werden im Heckbereich
untergebracht, da es zu hoch
lag. Zusätzlich wird der 5zellige Nimh Akku vor den Antriebsakkus
untergebracht, sodass sein
Gewicht auch noch ein wenig das Heck belastet. Nun
ist das Schiff für
nächste die Testfahrt ausgewogen. Mag sein, dass noch kleine Korrekturen erfolgen
müssen.
Am 3.6.24 wurde im Schwimmbad die Trimmung des
Modells vorgenommen und die Ruderwirksam-
keit
und die Antriebsleistung erprobt.
Gerwöhnungsbedürftig ist die neue Steuerung schon,
insbe-
sonders die Rückstellung des Ruders für die
Geradeausfahrt mit der Servoautomatik. Das Ansteuern
der Stelle zur Entnahme des
Modells aus dem Wasser wird Übung
brauchen.
Jungfernfahrt
mit einem Hoppala
Endlich, an 15.6.24 kam
es zur Jungfernfahrtr der Telecont-Liberty. Mit Hilfe
von Enkel Konstantin,
dem Co-Käptn,
wurde nach dem Einschalten der Tipp-Anlage und der
Funktionskontrolle, das Modell
zu Wasser
gebracht. Mit Freude und noch sehr ungewohnt, in Puncto
Beschleunigung, kam es durch
einige starke
Windböen zum Verfangen des Modells mit in den Teich
hängenden Ästen. Zugegeben,
ich kam in
Stress und vergaß Gas zu geben, um das Modell zu
befrreien. Endlich wurde mir klar,
dass nur mit
Leistung das Modell befreit werden kann, und es half,
das Schiff kam ffrei und fuhr auf
den Teich hinaus.
Die ersten Kurven ließen bereits erkennen, dass es
wegen fehlender Ruderneutralisierung der Servo-
automatic nicht ganz einfach
wird, das Modell auf Geradeauskurs zurücksteuern.
Erschwerend traten
immer wieder stärkere Windböen auf,
die vorerst schwierig auszusteuern waren. Irgendwie gelang es
schließlich
doch.
Die Liberty führ mit mittlerer
Geschwindigkeit nett am Teich dahin, doch wurde sie immer wieder von
heftigen Böen zum Schlingern gebracht. Klar,
das Modell hat keine Schlingerkiele.
Eine
besonders kräftige Böe ließ das Schiff stark auskrängen
und blies den gewichtigen aber
lediglich am
Deck aufgestellten Aufbau einfach über Deck. Da der
Aufbau aus Holz und Mast unten
schwamm, war
der Schreck nicht tragisch. Zum Glück
wurde der Empfänger nicht mitgerissen, ob-
wohl er mit der
durch die Mastspitzen durchgefädelten Antenne hätte über
Bord gehen können. Die
Antenne fädelte sich aus
und verschwand neben dem Rumpf im Wasser und die
Funkverbindung
war beendet. Das Eregbnis war fehlede Reichweite und ein nurmehr bedingt
steuerbares Schiff.
Irgendwie gelang es doch das Schiff ans
unbewachsene und zugängliche Ufer zu
bekommen und
herauszunehmen. Nach der Entfernung von
massenhaft Grünzeug an den
Propellern, liefen die
Mo-
tore wieder und auch die Steuerung funktionierte jetzt ordnungsgemäß.
Um künftig das Schlingern zu unterbinden wurden
Schlinegrkiele sofort nachgerüstet. Damit der
Aufbau nicht
wieder
über Bord gehen kann, wurden Hemmklötzchen angeklebt,
die das Abkippen
verhindern.
Die
Bergung
des Aufbaus
Nun galt es den in
Teichmitte den vom Wind hin- und hergetriebene
Aufbau ans Ufer zu bringen.
Jetzt kam es zum
ersten echten Einsatz meines Schubschiffes
MELK. Rasch aus
dem Auto geholt,
eingeschaltet und mit einem
Prüflauf erprobt, konnte die Melk zu Wasser gebracht
werden. Sie er-
reichte das Treibgut und
ich musste versuchen, den Aufbau mittigt zu treffen, um ihn
zum Ufer bug-
sieren zu können. Bereits die zweite
Anfahrt war erfolgreich. Der Aufbau konnte durch das
Schub-
schiff gut gelenkt werden, obwohl gerade
in dem Moment wieder starke Windböen aufkamen.
Schließlich am Steg angekommen, konnte
Enkel Konstantin
den Aufbau aus dem Wasser heraus-
fischen und das
Wasser entleeren.
Damit
war die relativ kurze Jungfernfahrt frühzeitig beendet
worden. Es gibt daher keine Videoauf-
nahmen,
abgesehen von.der Bergung. Siehe Video:
Bergung Aufbau
Liberty
Erfolgreiche Testfahrten
Am
20.6.
2024 konnte nach der Nachrüstung der Schlingerkiele und
nach der Anbrngung von Klötz-
chen zur
Verhinderung des Aufkippens des Aufbaus, wieder eine
Testfahrt erfolgen. Nachdem die
erste Fahrt nur
kurz ausfiel, war die Spannung groß, wie weit die
Telecont tatsächlich funktioniert.
Nachdem
das Schiff im Wasser war, startete die Fahrt hinaus auf
den Teich, wobei mit langsamer
Fahrt in die
Nähe des gegenüberliegendn Ufers gefahren wurde. Das
funktiionierte, doch schon nach
den ersten
Kurven wurde klar, dass die nicht neutralisierende
Servoautomatic doch nicht die ideale
Rudermaschine
für den Tipp-Anfänger ist. Der eher langsame Lauf des
Servos erschwert die Auffin-
dung der
Mittelstellung der Doppelruder. Weiters war der große
Ruderausschlag schwierig zu be-
herrschen. Vor
allem in Ufernähe erwies sich die Rudersteuerung sehr
schwierig, wobei sich die
Fahrtrichtungsumschaltung
Vor-Zurück, als zusätzlicher Stressfaktor erwies.
Daraufhin
wurde im Schiff eine Bellamatic Rudermaschine mit
Rücklaufregler eingebaut
und die
Ruderwege ein wenig verkleinert.
Am 21.6.2024 erfolgte bereits
die nächste Testfahrt. Dabei bewährte sich der Einbau
der Bella-
matic, durch die eine ruhige Fahrt
möglich wurde. Die Rückstellung der Bellamatic geht
relativ lang-
sam, was der Sache durchaus zugute kommt.
Ruderfunktion
Das Schiff kommt damit quasi
"gesteuert" langsam aus der Kurve und fährt dann
geradeaus. Wenn die Kurve rascher beendet
werden soll, muss ein kurzer Tipp entgegen gegeben
werden. Das verursachte ein leichtes Krän-
gen des
Schiffs, vor allem bei hoher Fahrgeschwindigkeit
sichtbar.
Nach wie vor gewöhnungbedürftig ist
Umstelldauer von der Vorwärts- zur Rückwärtsfahrt. Bei
einem
"Notfall" wird es stressig, wennn davor
langsam gefahren worden ist. Dann man muss zur raschen
Richtungsänderung noch Gas geben, - und das
dauert auch fast 3 Sekunden. Und wehe es war zu
viel, denn der Rücklauf des Fahrtreglers dauert
auch 2 Sekunden lang; - sehr gewöhnungsbedürftig.
Die Trimmung des Schiffes wurde
mechanisch nachkorrigiert, doch am Video entsteht der Eindruck,
der
Bug gehört noch ein wenig aus dem Wasser. Die
Empfängerakkus wurden bereits nach mitt-
schiff verlegt, der
Empfängerakku muss daher eine Kabelverlängerung bekommen,
damit er beim
anderen Akku liegt. Das sollte
ausreichen. Eventuell kann noch eine Bleiplatte
unter den Fahrakkus
angeordnet werden, damit zusätzlich
das Heck etwas tiefer zu liegen kommt.
Die
Reichweite der Steuerung genügt aus heuitiger Sicht
vollkommen, um das Schiff die Länge
des Waldteichs abfahren
zu können. Allerdings nur mit
gehobener Senderantenne. Der Sender auf
der Sitzbank liegend,
erreicht nicht genügend Reichweite. - Doch muss
man sagen, in 150m Ent-
fernung wird das Schiffsmodell schon sehr klein,
worunter der Anblick ohnedies leidet.
Bei Fahrten weit vom Ufer
entfernt, ist der den Rauchgenerator abzuschalten, da
man den dünnen
Rauch nicht mehr sieht.
Mit 0,5ml Rauchöl kann ~6 Minuten lang Rauch erzeugt
werden.
Der
Stromverbrauch des Modells ist gering, denn nach einer Stunde
Gesamtfahrzeit mit eher lang-
samer Fahrt, ist die Akkuspannung
von 8,3 V auf 8,1V gefallen. Längere Fahrzeit wäre
möglich.
Im Werfthafen von Korneuburg
erfolgte am 8.7.2024 der
nächste Langzeit- und Reichweitentest. Das
etwas umgewichtete Schiff
lag jetzt besser auf Wasserlinie, doch könnte der Bug
noch etwas höher
liegen. Die Erprobung verlief
erfolgreich, der nachgerüstete ältere GR-Fahrtregler
arbeitete gut.
Um die Reichweite zu prüfen
wurde der Sender in Bodennähe auf meinen Beinen
gehalten, da ich
am Boden saß und die Antenne
nicht senkrecht stand, wodurch eine ungünstigere
Abstrahlung als
beim Stehen entsteht. Im Sitzen ist mir jedoch
das Aufnehmen eines Videos möglich, daher die
ungünstige
Senderposition. - Trotzdem konnte so
weit weggefahren werden, dass noch am Umriss
des Schiffs
erkannt werden konnte, wenn kleine
Ruderausschläge die Fahrtrichtung änderten.
So weit
wegzufahren mindert den optischen Eindruck des
fahrenden Modells. Fahrten im Umkreis
von 100m, bei
denen man noch Details am Schiff erkennen
kann, sind problemlos möglich.
Fahrtechnisch
bewährte sich der U/mbau der Rudersteuerung durch eine
Bellamatic. Der langsame
Rücklauf muss
abgewartet werden, bis das Schiff geradeaus fährt.
Möchte man den Kurs korrigieren,
sind ganz
kurze Knüppeltasungen notwendig. Mit dieser Steuerung
und bei eher langsamer Fahrt
kann das Schiff sehr vorbildlich gefahren
werden.
Beim Anlegen ist vorausdenkend zu
steuern, da die Umschaltung Vorwärtsfahrt zu
Rückwärtsfahrt
zwecks Abbremsen, lange dauert. In dieser Zeit legt das Schiff je
nach Zufahrgeschwindigkeit eine
bestimmte
Fahrstrecke zurück, die man im Voraus einplanen muss!
Wird es knapp,wird die zusät-
liche Steuerung mit
dem Ruder stressig. Übung ist erforderlich.
Die
Raucherzeugung bei Fahrten auf weiten Gewässern wie im
Werfthafen, ist nur bis zu einem
Abstand von 5m zu
erkennen. Am grünen Waldteich sieht man den Rauch etwas
besser.
Für die nächste Fahrt
wurde zur Gewischtveränderung der Empfänger und die Rudermaschinen
um 3,5cm zur
Rumpfmitte hin verlegt. Weiters wurde die auf den
Masten befindliche Funkantenne
aus
Kupferdrähten als Empfangsantenne mitverwendet. Daher muss vor
dem Aufsetzen des
Aufbaus das Antennenkabel im
Rumpf angesteckt werden! - Die nächste Fahrt am Waldteich wird
zeigen, ob die Antennenabstimmung passt und so bleiben kann.
Am 15. 07. 2024 wurde wieder
eine Testfahrt im Waldteich durchgeführt, wobei die
Reichweite mit
der neuen Antennenverlegung
via die Kupfedraht-Antennen zwischen den Masten, überprüft wurde.
Es gab keine Funktionsstörungen. Die
Gewichtsverlagerung durch die Verschiebnung der
Empfangs-
anlage war gut, dennoch muss noch eine
Bleiplatte auf Höhe des Ruderservos
untergebracht werden,
um die Wasserlinie am Heck
noch besser
zu erreichen. Das Schiff liegt jetzt tiefer im Wasser
als mit
der Varioprop12- Anlage.
Abstellung des
Schiffsmodells Liberty
Nachdem das
Schiff jetzt jederzeit einsatzbereit wäre, aber der
Platz am Bautisch zu gering ist, wird
es wieder
verpackt und am Dachboden abgestellt.
Zuvor
wurden noch die Wellen geschmiert und die Empfangsanlage
mit dem Telecont Empfänger,
die GR-Kabelverlängerungen, die Akkus 6V und 2,4V, der NiMh
5zellige Rauch-Akku und die
LiIon-
Zelle für die Beleuchtung (ldie beiden
etzteren in der Akku-Box), sowie die
Fahrakkus entnommen.
Der Fahrtregler, die
Umpol-Servoautomatic, dieTipp-Elektronik für den
Raucherzeuger und die Ruder-
Bellamatic blieben
im Schiff.
|
|
ntenne |
|
|
|
 |
 |
 |
 |
|
das Schiff "Liberty" |
|
|
Bergung des Aufbaus
Video |
 |
 |
 |
 |
|
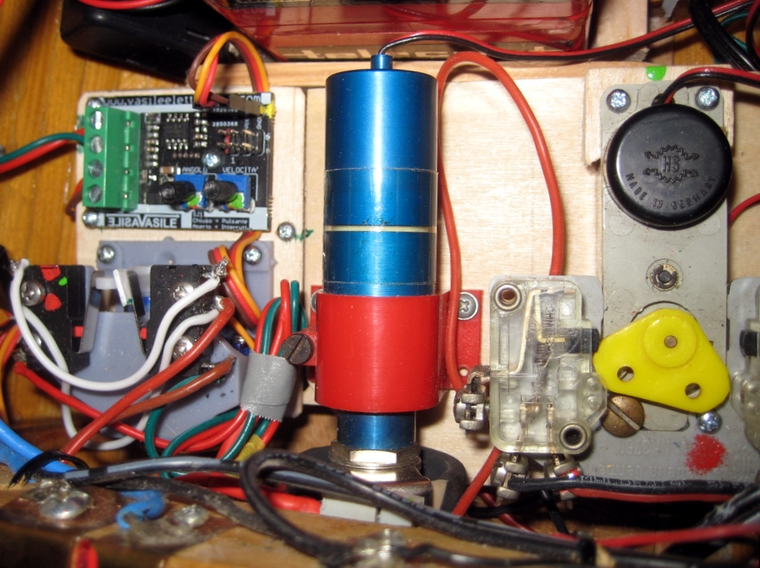
der 9K Empfänger |
Servoautomatic mit Umpolsatz |
Fahrtregler |
Eigenkreation
Tipp-Schaltelektronik |
|
Bilder von der Ausgangssituation
|
 |
 |
 |
 |
|
Rumpf Mittelteil |
Rumpf Vorderteil |
die Einbauten sind an ihrem neuen Platz |
die LiFe-Zelle für die Beleuchtung |
|
Bilder von
der U/mrüstung auf die Telecont Fernsteuerung |
|
|
 |
 |
 |
 |
|
der ausgeräumte Rumpf |
probeweise untergebrachter Telecont Empfänger |
Servoautomatic Rudermaschine für die Ruderyteuerung |
provisorisch einghebaute Steuerung |
 |
 |
 |
 |
|
Ansicht Umpolschalter und Fahrtregler |
endgöltige Eunbaulage der Steuerung |
Rudernaschinenansicht von vorne |
Blick auf die Rudermaschinen |
 |
 |
 |
 |
|
Erprobung des Rauchelements |
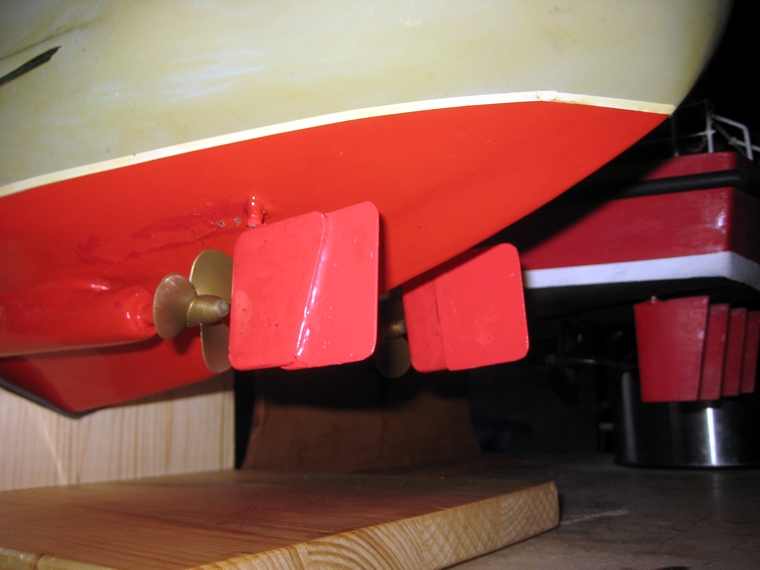
Heck ohne Prop-Leitbleche |
neue Gewichtsverteilung - fertig |
Schlinerkiele nachgerüstet |
|
|
 |

|
 |
|
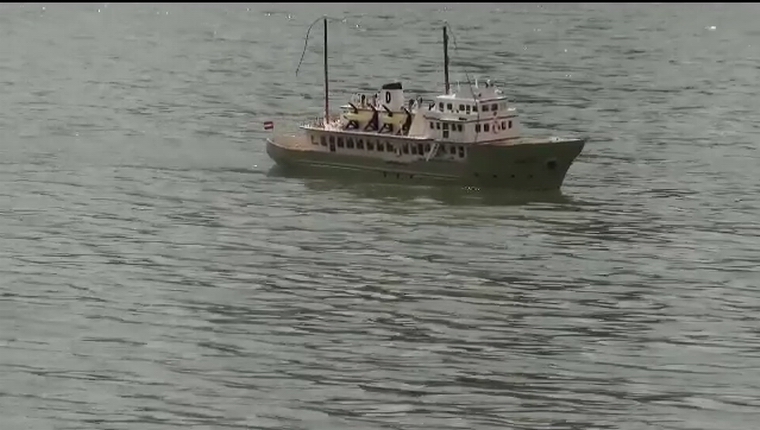
erfolgreiche Testfahrt am Teich |
Fahrvideo |
Telecont Ruderbetätigung
Video |
neu: Bellamatic steuert Ruder |
 |
 |
 |
 |
|
Reichweitentest im Werfthafen |
|
|
Fahrvideo Werfthafen
(Telecont) |
|
|
|