| |
|
|
|
|
|
Bei einer Plauderei mit einem
Modellflug Kameraden bot er mir zwei fertige
Modellschiffe an, die er im Zuge einer
Nachlassgeschichte bekommen hat.
Da er kein
Interesse daran hat, aber meine Begeisterung für
Schiffmodellbau
sah, denkt er, dass ich damit
Freude haben werde. Das ist natürlich richtig,
noch dazu, dass er eine, mir sehr angenehme Gegenleistung
erwartet. Er bat
sich aus, einmal mit mir und
seinen ehemaligen Schiffen fahren zu können.
Die Yacht
Marauder ist brauchbar gut gebaut worden und mit einem
6V Navy
Getriebeantrieb ausgestattet.
Ein Robbe mini 200 Regler diente zur Motor-
regelung. Derzeit ist
noch eine 35Mhz
Steuerung eingebaut die mit einem
Dreikanal Sender gesteuert wird.
Sie wurde jedoch gegen eine 2,4gHz
Steuerung
ausgetauscht.
Wegen der 6V Nennspannung
des Motors sollte natürlich nur ein 6V Bleiakku
verwendet werden. Das Schiff wurde später mit 2S Lipo Akkus
gefahren,
damit etwas Leben ins Schiff kommt. - Es
folgte danch die Umrüstung auf
einen
getriebelosen Antrieb mit einem Brushless Motor der
gesondert be-
schrieben wird und die
zweite
Zeile der Überschrift zur neuen Seite führt.
Technische
Daten:
Länge
900mm, Breite 250mm, Gewicht: ~3100g,
Antrieb: 6V
Robbe-Getriebemotor Navy Kompakt,
Rennprop
2 Blatt 45 Dm,
Regler: New Rain 60A BEC,
Antriebsakku: Vers.1: Blei, 6V 7200mAh, Vers.2: 2x 2S3000
Lipo parallel,
Fernsteuerung: Flysky i6X (5), Funktionen:
Motor, Ruder
|

Marauder Vorbildschiff

Marauder
erste Fahrt
Fahrvideo

Marauder in Brushless Version |
Die Arbeiten für die Wiederinbetriebnahme
Das
Modell war ziemlich staubig und wurde grob abgesaugt und
dann
mit einem Pinsel gereinigt.
Eine Reinigung mit
Seifenwasser war danach unumgänglich notwendig. Wichtiger war mir
jedoch
die Sichtung und Erprobung der technischen
Ausrüstung. Dazu mussten provisorische Kabelver-
bindungen
hergestellt werden. Die vermutlich
betriebsfähige Beleuchtung der Yacht könnte even-
tuell zu
einem späteren Zeitpunkt aktiviert werden.
Um den Motor,
den Regler und das Ruderservo testen zu können, musste der 3K Sender für den
Schiffsbetrieb mit einer Gasraste
versehen werden. Offenbar ist auch dieser
Sender neu, denn er
konnte nicht funktionieren, da
falsche Quarze eingesetzt waren. Nachdem in
Mittelstellung des Gas-
knüppels eine kleine Raste eingefräst
worden war,
konnte der Rastenhebel aus einem Streifen
Beryllium Blech angefertigt und eingebaut werden.
Nun ist der Startpunkt für den Regler eindeutig.
Anschließend mussten noch die Stecker des Empfänger Akkukabels
umgelötet werden, damit es
zum Simprop System passt und
eine Ladung möglich ist. Endlich war auch der
Empfängerakku auf-
geladen und es konnte mit dem 6V
Bleiakku der erste Steuerungstest durchgeführt werden.
Doch der
Ruderausschlag war zu gering, da am Servo
ein zu kurzer Ruderhebel montiert war. Es
konnte ein längerer Hebel gefunden werden, der jedoch
einen Vierkant als Mitnhemer haben
musste.Die Servos hatten ehemals Vierkantmitnehmer, welche die Möglkichkeit boten,
in der Mitte
mit einem 1mm schmalen Schraubenzieher die
Neutralstellung des eingebauten Servos verändern
zu können. Das war ideal, wenn man ein
Steuergestänge nicht verändern konnte. Das eingebaute
Ruderservo scheint aus späten 1970ziger Jahren
zu stammen, es ist aber neuwertig.
Bedauerlicher Weise
ist der alte Robbe Regler nicht genügend variabel,
so dass Drehzahlen des
Vorwärts- und
Rückwärtslaufes nicht einstellbar sind. Auch die Ruder
Mittenstellung konnte mit der
3K Steuerung
nicht optimal justiert werden, weswegen eine 2,4
gHz Flysky Steuerung
verwendet
wird. Anstelle des Robbe Reglers
wird ein New Rain 160A Regler verwendet, der mit seinem
BEC
den Empfänger und das Ruderservo versorgt.
Der Erbauer hatte es gut gemeint und nahe
dem Motor im Stevenrohr eine Bohrung hergestellt, auf die
vermutlich ein Öler hätte kommen sollen. Offenbar wurde
darauf noch vor dem EInbau des Steven-
Rohres
vergessen, sodass ich es vorzog, anstelle des
Ölers die Bohrung zu verschließen. Löten war
nicht
möglich, daher
verwendete ich ein 2cm langes Stück 6mm Silikonschlauch, welcher
geschlitzt
und über das Stevenrohr
gestülpt wurde. Mit einem Tropfen Sekundenkleber wurde
er gegen Verrut-
schen gesichert. Nachdem kein
Überdruck im Rohr entsteht, genügt diese Methode zur
Abdichtung
gegen Wassereintritt.
Zuletzt
wurden Kabel angefertigt, die zur Verbindung mit den
zur Verwendung stehenden Akkus dienen
werden. Da mit
erhöhter Spannugn aus den Lipos gefahren wird, ist mit
einer Erwärming des Motors
zu rechnen. Um dagegen
zu wirken wurde ein 40mm PC Lüfter mit einer Klammer am
Motor befestigt.
Er ist zuschaltbar und wird
mit der Motorspannung betrieben.
Das
Auswiegen
Endlich,
am 3.6.24, passte das Wetter und es
konnte die Marauder auf Wasserlinie gebracht werden.
Bei der Yacht Marauder wurde der 6V 7,2Ah
Bleiakku erprobt. Die Marauder liegt damit schon fast
auf Wasserlinie. Um die Schiffslage noch zu
verbessern, wurde der Akku um ca.5cm in Richtung Motor
und Heck
verschoben. Um das Heck noch
tiefer ins Wasser zu bringen wären Bleiplatten
einzubringen.
Im Schwimmbad wurde auch eine
kleine Probefahrt durchgeführt, die zeigte, dass der
Regler einen
Defekt hat. Der Motor lief immer
nur 5 Sekunden lang. Ein neuer 60A Regler wurde
eingebaut und der
Motor läuft nun am Bautisch wie
es sein soll und auch mit höherer Drehzahl.
Weiters
gab es einen Wassereintritt im Boot. Man konnte nicht
genau erkennen, woher das Wasser
kommt, doch
bei den Ruderführungsrohren war alles trocken. Jedoch scheint es
bei den Abstützungen
der Badetreppe einzusickern.
Dei sechs Befestigungspunkte wurden daher mit 5Min Epoxy
übergos-
sen und sind damit abgedichtet.
Da Wasser es auch beim Wellendurchtritt
in den Rumpf einsickern könnte, wurde reichlich Sekunden-
kleber
Dick in diesem Bereich eingefüllt. Bei der nächsten Testfahrt im Teich muss
der Wasser-
eintritt beobachtet werden.- Dir
Ruderwirkung ist eher gering, insbesondere bei
der Rückwärtsfahrt.
Fahrberichte der Marauder
Am
15. 6. 2024 wurde die Yacht im Waldteich zu Wasser
gebracht und gefahren. Sie fährt mit dem
6V Akku
nicht sehr flott, ist aber in Vorwärtsfahrt gut
steuerbar. Zurückfahren in gerader Linie ist mir
unmöglich
gewesen,
denn der Radeffekt des Propellers gibt hierbei die Richtung vor.
Die zu klein
dimensioniertten Doppelruder genügen dabei nicht, um eine
gerade Strecke rückwärts zu fahren.
Eine
zwischendurch erfolgte Kontrolle ergab, dass kein Wasser
im Schiff war und der Motor nur
lauwarm war.
Am 8. 7. 2024 erfolgte die nächste
Fahrt im Werfthafen. Mit 2S Lipo Akkus wurde das Schiff
deutlich
agiler. Zwischendurch wurde durch
kleine Änderungen mit einer Gewichtsveränderung die
Schiffslage
optimiert. Die Motortemperatur
wurde überwacht und blieb trtotz überwiegender
Vollgasfahrt bei
55 Grad. Dennoch zeigte
das Fahrtbild, dass mehr Fahrt ein beseres optisches
Bild des Modells
bringen würde. Es wird daher
angedacht, später mal den Antrieb umzubauen und mit
einem Brush-
lessmotor 3548 mir Rennprop 40 Dm
zu bestücken.
|
|
|
|
|
|
 |
 |
 |
 |
|
Ansicht vor Überarbeitung |
|
|
praktische Öffnungsmethde |
 |
 |
 |
 |
|
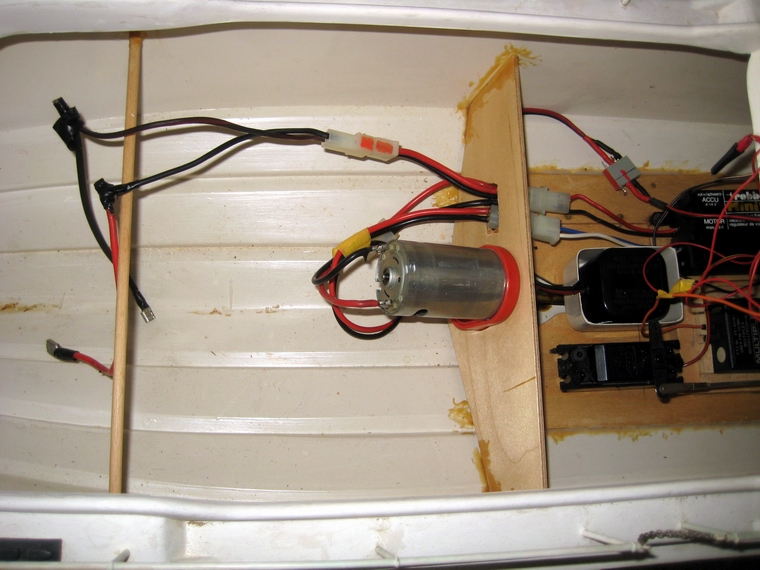
Ansicht Antriebsmotor |
Blick auf die alte Empfangsanlage |
neuer Regler einbebaut |
der neue Flysky Empfänger |
|
|
 |
 |
 |
|
Bilder Erstfahrt |
|
Fahrvideo |
Marauder und Schubc hiff Melk |
|
|
|
|
|
|
|
|